TP2: Calibrage de caméraDébutLundi 7 février 2011.RemiseLundi 7 mars 2011.Attention: Bien que certaines données fournies pour ce travail pratique soient inclues dans des notebooks Mathematica, vous êtes libres d'implémenter votre travail en Mathematica ou C/C++. Cependant, l'utilisation de fonctions OpenCV de calibrage est interdit, sauf si vous voulez comparer vos résultats. Partie 1 : Calibrage avec un objet 3D (7 points) Vous devez calibrer la caméra pour différents modèles:
Calculez la matrice P à partir des quatre ensembles de points
donnés plus bas. Les points p1,p2,p3,p4 sont les points 2D et les points
q1,q2,q3,q4 sont les points 3D correspondants.
Attention: la distance focale peut varier d'une caméra à l'autre. Les données sont dans calib3DData.nb. Il n'y a pas d'erreurs de correspondance. Partie 2 : Calibrage par plans (8 points)
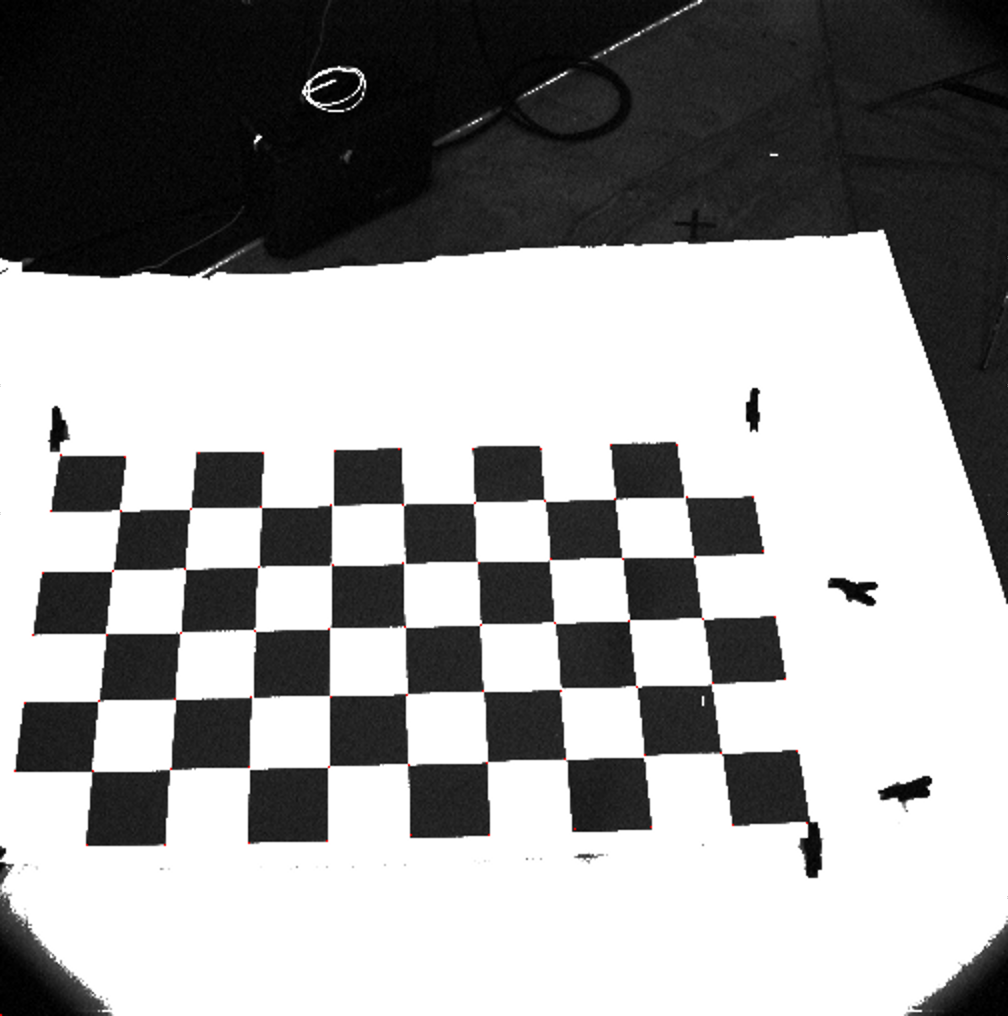
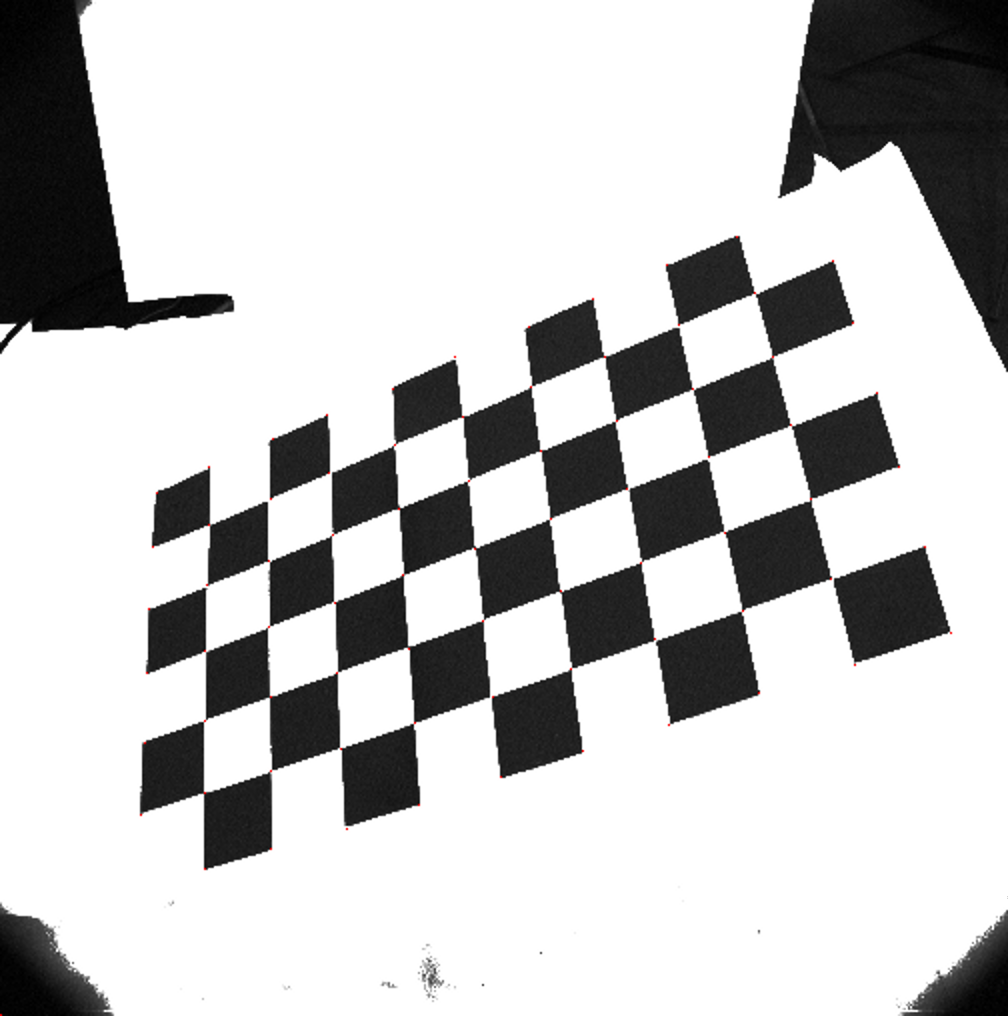
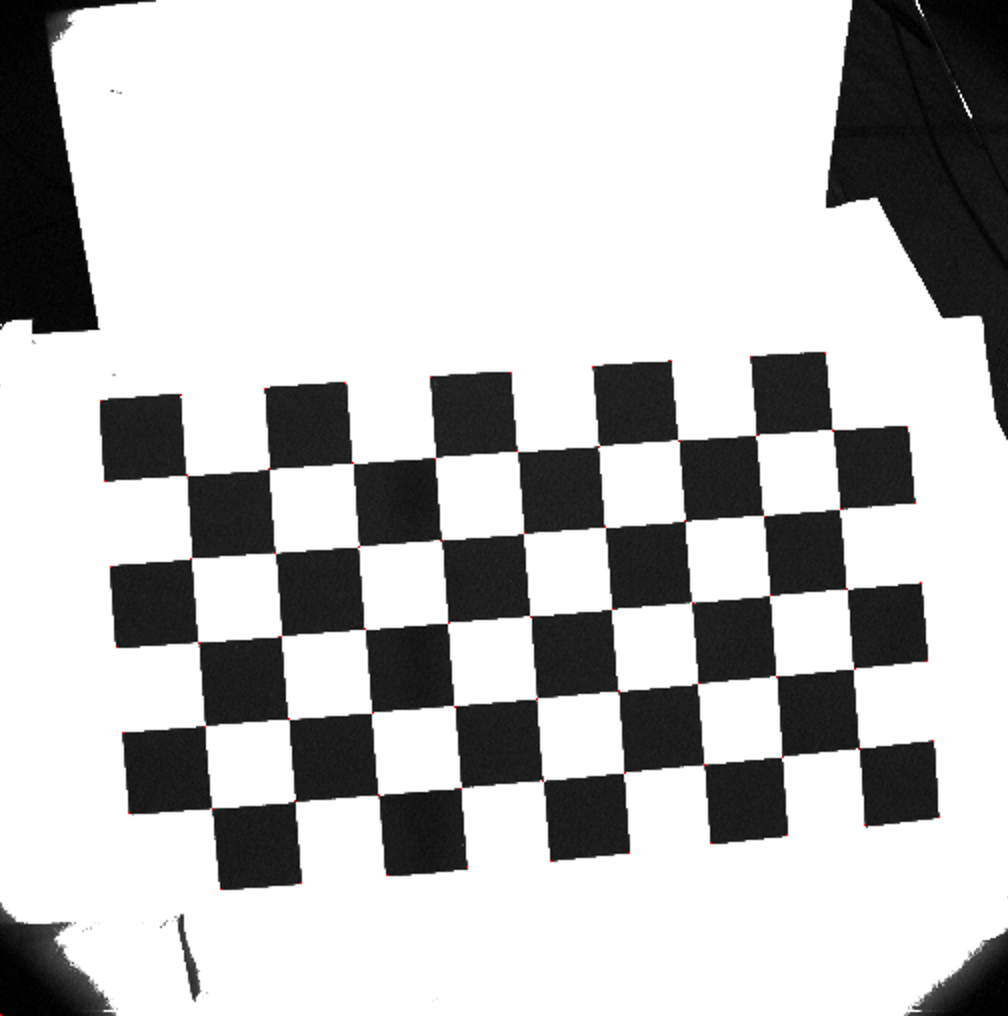
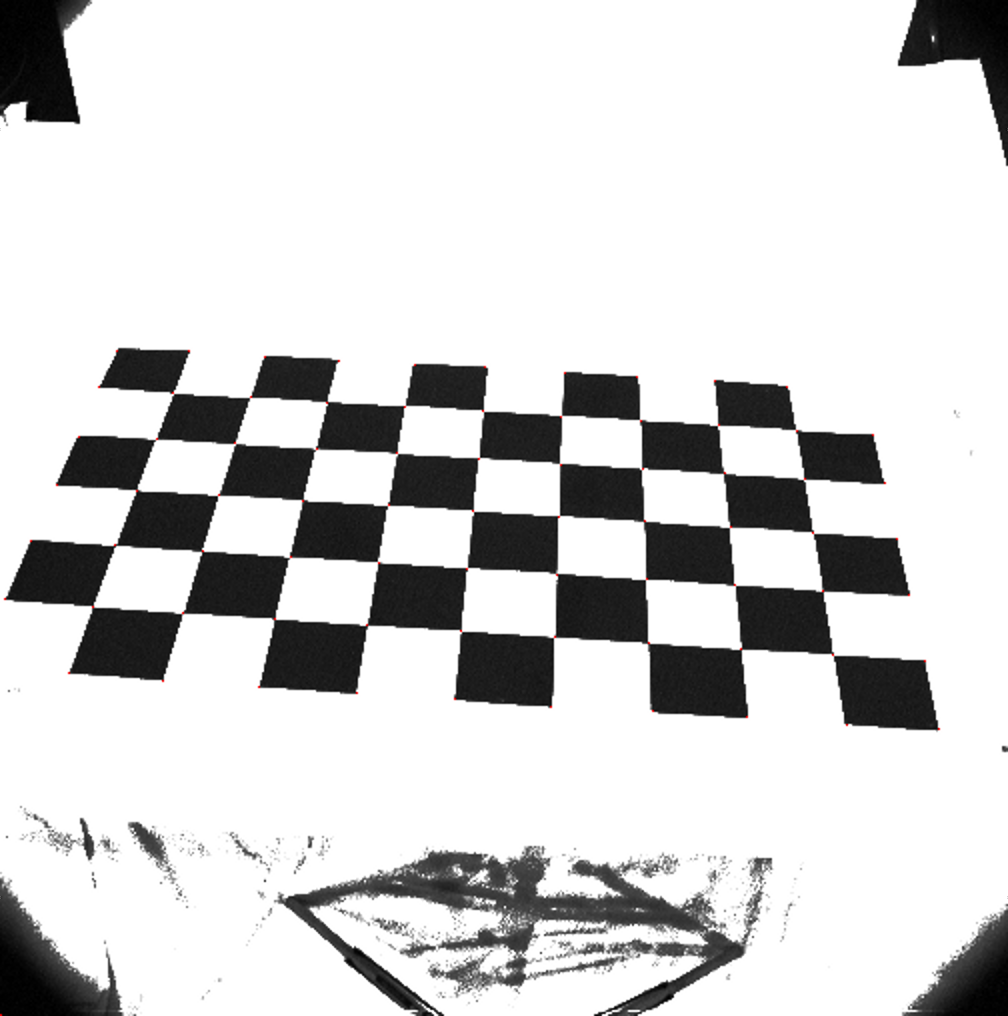
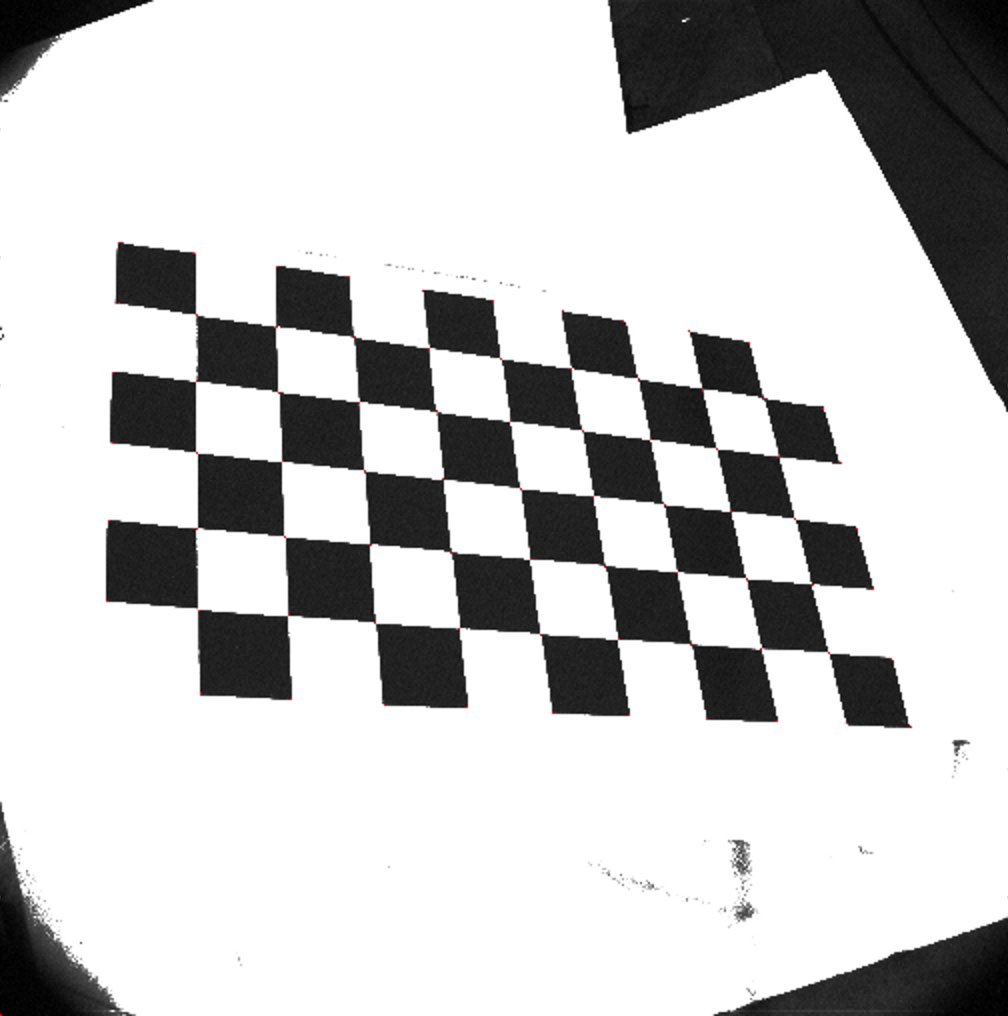
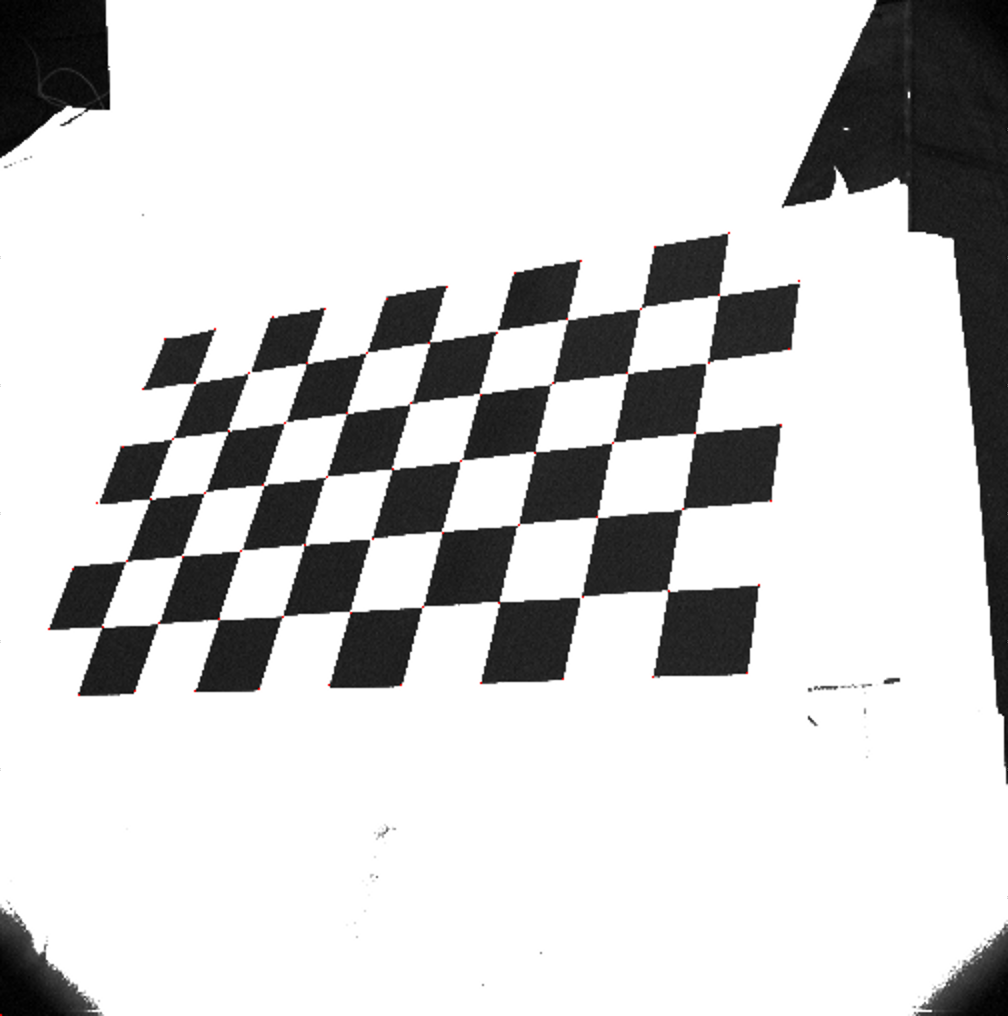
DescriptionPlusieurs photos sont prisent d'un même plan de calibrage, sous des angles différents. Les paramètres internes de la caméra ne changent pas entre les vues. Seuls la rotation et la translation changent. Voici les images:
Les fichiers de données contiennent les points mis en correspondance. Les deux premiers points sont les coordonnées (x,y) du point en pixel dans l'image, et les deux suivants sont les coordonnées (x,y) en centimètres sur le plan de calibrage. Par exemple, pour l'image 0, la première paire de points est (91.022861, 243.270896) dans l'image et ( -6.3, 6.3 ) sur le plan de calibrage. Vous pouvez utiliser le notebook calibPlanData.nb pour lire les données. Vous devez:
À remettre
|
|
Modifié le: mardi 22 février 2011, 10:05 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}