Participation to ADAGIo team
Research themes of ADAGIo team are the study of dicrete algorithms
applied to geometry and image domains.
In this context, activities in computer vision field rely on the
analysis of available discrete data (digital images,
cloud of scanned points) in order to recover three-dimensional
information about sensed environments.
Many treatments are successively applied to these data, and it
would be useful to stay as long as possible in numerical domain
to benefit from exact calculation, and thus ensure shorter execution
time and better application control.
My participation to the team activities deals with design and
validation of new discrete geometry tools (structures and
algorithms) dedicated to computer vision domain.
Foreseen actions deal in first stage with visual features extraction,
then with data segmentation and at longer term, 3-D interpretation
of extracted features for interactive 3D modelling tasks.
Visual features extraction
Extracting visual features such as edges, dominant points, alignments,
... from sensed data is generally the first step of the processing
pipeline. It most often impacts the quality of output results.
Automatic mode may provide a large amount of features, but the
overall quality may be highly affected by the presence of few
outliers. Better reliability could be achieved by manual modes
through more selective selections, but at the price of fastidious
job and excessive production time. In supervised mode, efficient
assists may greatly help if some ergonomy criteria are correctly
fulfiled. Whatever the mode, no information is produced on the
relevance of the visual features for further processings.
It would thus be interesting to augment the extracted features with
some quality measurement (scattering, sharpness, linearity, ...).
A blurred segment is a set of points, that all belong to a
digital straight line with fixed thickness. This notion seems
appropriate to vehiculate a quality measure related to extracted
straight line segments from images.
Therefore, in collaboration with Bertrand Kerautret and Phuc Ngo,
we developed a blurred segment detector in
gray-level images based on a novel approach: creation and incremental
extension of a blurred segment within directional scans. A
directional scan is a thick stripe splitted into orthogonal straight
line segments, called scans. Candidates for the blurred segment
extension are searched in each scan, based on image gradient.
The directional scan is either manually defined by its central scan
in supervised mode, or blindly swept over the whole image in
automatic mode.
 A first version [44] contributed to validate this
approach relevance for supervised on-line extractions.
Two new concepts (adaptive directional scans and
assigned thickness control) and a global detection
algorithm were later integrated to realize a more efficient tool,
called FBSD
[48].
It supports as well supervised as unsupervised mode and requires
only few intuitive parameters to set.
FBSD was compared with recent detectors from the literature
(LSD, CannyLines and ED-lines) on York Urban data base,
a data base composed of urban environment images with their
groundtruth lines published by University of Toronto.
Similar time and precision performance was put forward.
FBSD source code
and on-line demonstration
are left available.
A first version [44] contributed to validate this
approach relevance for supervised on-line extractions.
Two new concepts (adaptive directional scans and
assigned thickness control) and a global detection
algorithm were later integrated to realize a more efficient tool,
called FBSD
[48].
It supports as well supervised as unsupervised mode and requires
only few intuitive parameters to set.
FBSD was compared with recent detectors from the literature
(LSD, CannyLines and ED-lines) on York Urban data base,
a data base composed of urban environment images with their
groundtruth lines published by University of Toronto.
Similar time and precision performance was put forward.
FBSD source code
and on-line demonstration
are left available.
3D data segmentation
The goal is here to extract geometrical structures (linear, planar, ...)
from a cloud of 3D points.
Laser-based or correlation-based 3D sensors provide a huge amount of
data at the surface of observed scene objects.
It may suit quite well to the modelling of complex shapes.
But for simpler surfaces such as those of industrial environment
objects, it shows redundant and impedes both processing speed and
memory management.
The goal is here to detect regular structures in the set of
scanned points.
Together with Phuc Ngo, we first designed a new framework to extract
linear structures such as roads, walls, ditches, ..., from raw
LiDAR data (the 3D point cloud) of a forested site
[49].
The work was led in collaboration with earth scientists in the
scope of an interdisciplinary project at Université de
Lorraine, called SolHoM-Fossard.
The detection of linear archeomorphological structures in LiDAR
data is a difficult problem:
i) these shapes are quite loose with large variations all along their
layout;
ii) the distribution of input 3D points labelled as "ground" is very
heterogeneous.
In particular on the studied site, the presence of dense conifer
plantations and the low vegetation still present when the data
were acquired are as many obstacles to the laser beam penetration.
The derived Digital Terrain Model (DTM) features large approximations
that final users, but also automatic algorithms, are not aware of.
Contrarily to most existing solutions based on DTM analysis,
the new solution designed for this project relies on a direct
processing of the "ground" points using the discrete geometry tools
that have been developed in ADAGIo team (blurred segments, adaptive
directional scans).
The framework is as follows.
Starting from an initial stroke drawn by the user over the DTM view,
corresponding 3D points to this initial scan are collected to get
a first profile used to detect the structure.
This structure is then tracked in adjacent scans on both sides,
until a maximal number of successive failures happens.
The used discrete geometry tools ensure a good efficiency to this
approach. Moreover, occluded areas are detected and thus possibly
crossed, at the contrary of DTM analysis based approaches.
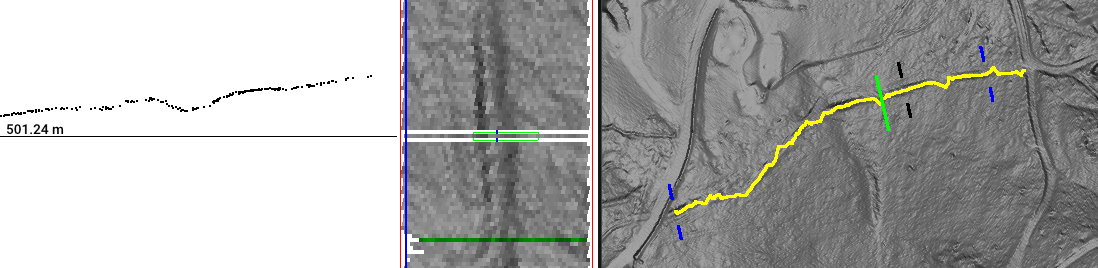
Interactive extraction of a holloway :
on the left, a 3D point profile; at the center, the analyzed
scans; on the right, the detected structure superimposed over
the DTM view (in green, the initial stroke; in black, the position
of the analyzed profile; in blue, selected scan bounds for the
volume estimation).
The approach was experimented on two different structures.
At first, forest roads have been used as ground truths to evaluate
the achieved performance, as these structures are well marked in
DTM views.
Sections of several hundreds of meters are extracted on the fly
with correct precision (75%) and recall (80%).
Then, the approach effectiveness has been tested and validated for
the extraction of well identified ridge structures (break-in-slopes,
decayed medieval wall).
In a second stage, this extraction approach was integrated into
a full automatic extraction tool of forest roads from LiDAR data
[50].
To select relevant seeds, the DTM is processed by RORPO
morphological filter to enhance elongated shapes, then by FBSD
to select the longest straight edges.
The processing of the whole Fossard massif (755 millions of points
on about 78 squarred kilometers) took 29 minutes on a standard
portable computer.
The automatic road extraction tool, called
AMREL
(Automatic Mountain Road Extraction from LiDAR data),
is available on a GitHub platform, with a
test data set.
Then, the interactive framework has been completed to detect linear
hollow structures as well, and to provide a finer analysis of their
longitudinal and cross profiles and an estimate of their volume
[51].
Its effectiveness to real situations was evaluated through two
study cases:
i) a survey of a known medieval wall remains and of still undisclosed
parts of its layout;
ii) a study of the geometry of old holloways to get an understanding
of their past evolution.
The linear structure detecton tool, called
ILSD (Interactive Linear Structures Detector),
is available on a GitHub platform.
Interactive 3D modelling
The third research axis deals with the design of discrete geometry
tools intended to decision help in interactive 3D modelling tasks.
Automatic 3D modelling aims at providing a dense but weekly discriminant
3D model of the sensed scene. At the opposite, interactive 3D modelling
lets the user compose the 3D model according to application goals
by setting the level of detail given to each object.
Beyond ergonomy concerns dealing with this complex task realization,
many geometric inconsistencies due to error propagation on measured
objects may impede drastically this approach promises.
The goal is thus to design and test decision tools based on the
two former axes results to solve this problem.
For instance, it could be great to give at the user's demand
local confidence measures on the model accuracy. This could be
based on some propagation in the 3D interpretation algorithms
(mostly pose computation) of the quality information produced when
extracting visual features from the sensed data (blurred segments).