Activités dans l'équipe ADAGIo
Les activités de recherche de l'équipe ADAGIo du LORIA
portent sur l'étude d'algorithmes discrets pour la
géométrie et l'imagerie.
Dans ce contexte, les travaux en vision par ordinateur reposent sur
l'analyse de données discrètes (images numériques,
nuages de points issus de scanners) pour produire des informations
tridimensionnelles sur l'environnement observé.
De nombreux traitements sont consécutivement appliqués
aux données, pour lesquels il est intéressant de rester
le plus longtemps possible dans le monde discret.
On peut ainsi espérer bénéficier d'une
arithmétique exacte, et d'en tirer une bonne rapidité
de traitement et un meilleur contrôle de l'application.
Ma participation aux activités de l'équipe concerne
la conception et la réalisation de nouveaux outils de
géométrie discrète (structures et algorithmes)
plus particulièrement dédiés au cadre de la
vision par ordinateur.
Les travaux envisagés portent dans un premier temps sur
l'extraction d'indices visuels, puis sur la segmentation des
données 3D, avant de s'attaquer à plus long terme au
problème de l'interprétation tridimensionnelle des
indices extraits pour des tâches de modélisation 3D
interactive.
Extraction d'indices visuels
Extraire des données observées un ensemble d'indices
visuels (contours, points dominants, alignements, ...) est
généralement la première étape de
traitement. Elle s'avère souvent déterminante sur la
qualité des résultats produits en sortie.
En mode automatique, il est possible d'obtenir une grande
quantité d'indices, mais la qualité globale peut
être notablement dégradée par la présence
d'indices erronés (outliers).
En mode manuel, l'extraction plus sélective assure une
meilleure fiabilité, mais s'avère fastidieuse et
coûteuse en temps de réalisation.
En mode supervisé, une assistance efficace peut être
obtenue sous réserve de veiller aux règles
d'ergonomie.
Aucun de ces modes ne délivre une information sur la
précision des indices visuels obtenus en vue d'une exploitation
dans les traitements ultérieurs.
Il serait donc pertinent d'assortir les indices extraits d'une
mesure de qualité (diffusion, netteté,
linéarité, ...).
La notion de segment flou, ensemble de points appartenant
à une droite discrète d'épaisseur fixée,
a été retenue comme un candidat prometteur pour
véhiculer cette mesure.
A cet effet, dans le cadre d'une collaboration avec Bertrand Kerautret
et Phuc Ngo, nous avons mis au point un
détecteur de segments flous dans des images en niveaux de gris,
basé sur une approche originale : la création et
l'extension incrémentale d'un segment flou à
l'intérieur de scans directionnels.
Les scans directionnels sont des bandes épaisses,
partitionnées en petits segments de droites discrètes
orthogonaux à l'axe de la bande, appelés scans.
Des candidats pour prolonger le segment flou sont extraits de
chaque scan à partir du gradient de l'image.
Le scan directionel est défini par la donnée manuelle
de son scan central en mode supervisé, ou par balayage de
l'image en mode automatique.
 Une première version [44] a permis de valider le
potentiel de l'approche en contexte supervisé.
Depuis, deux nouveaux concepts, les scans directionnels
adaptatifs et le contrôle de la consigne
d'épaisseur, ainsi qu'un algorithme d'extraction globale,
ont été intégrés au détecteur pour
produire une version plus efficace, nommée FBSD
[48].
FBSD fonctionne en mode supervisé ou entièrement
automatique, avec un jeu restreint de paramètres intuitifs
à régler.
Une comparaison avec des détecteurs récents (LSD,
CannyLines, ED-Lines) sur une base d'images assorties de
vérités de terrain (York Urban data base) a mis en
évidence des performances similaires en précision et
en temps d'exécution.
Le code de FBSD
est accessible sur un dépôt GitHub et une
démonstration en-ligne est également disponible.
Une première version [44] a permis de valider le
potentiel de l'approche en contexte supervisé.
Depuis, deux nouveaux concepts, les scans directionnels
adaptatifs et le contrôle de la consigne
d'épaisseur, ainsi qu'un algorithme d'extraction globale,
ont été intégrés au détecteur pour
produire une version plus efficace, nommée FBSD
[48].
FBSD fonctionne en mode supervisé ou entièrement
automatique, avec un jeu restreint de paramètres intuitifs
à régler.
Une comparaison avec des détecteurs récents (LSD,
CannyLines, ED-Lines) sur une base d'images assorties de
vérités de terrain (York Urban data base) a mis en
évidence des performances similaires en précision et
en temps d'exécution.
Le code de FBSD
est accessible sur un dépôt GitHub et une
démonstration en-ligne est également disponible.
Segmentation de données 3D
L'objectif visé dans cet axe est d'extraire des structures
géométriques (linéaires, planes, ...) d'un nuage
de points 3D.
Les scanners, basés sur la télémétrie
laser ou sur les techniques de corrélation entre images de
caméras, produisent de grandes quantités de points
de mesure à la surface des objets de la scène
observée.
Cette multitude d'informations convient quand la scène
comporte des formes complexes.
Dans le cas de surfaces uniformes, de grandes portions planes par
exemple, elle devient inutilement redondante et pénalise
les traitements et le stockage.
L'objectif est donc de détecter des structures
régulières dans l'ensemble de points scannés.
Dans un premier temps, en collaboration avec Phuc Ngo, nous avons
travaillé sur l'extraction
de structures linéaires; (routes, murs, fossés, ...) de
données LiDAR brutes (le nuage de points produit) de sites
forestiers, dans le cadre d'un projet interdisciplinaire interne
à l'université de Lorraine (SolHoM-Fossard), en
collaboration avec des archéologues et des géologues.
La détection de structures archéo-morphologiques
linéaires dans les données LiDAR est un problème
complexe en raison d'une part du caractère diffus de ces formes
avec des variations importantes tout au long de leur tracé,
et d'autre part de la répartition très
hétérogène des points LiDAR classés
"sol" permettant de les identifier.
En particulier, la forte concentration de conifères et le
couvert végétal bas encore présent au moment de
l'acquisition sont autant d'obstacles à la
pénétration du LiDAR.
Le modèle numérique de terrain (MNT) construit sur ces
points comporte d'importantes approximations difficilement perceptibles
par les utilisateurs finaux, mais aussi par les algorithmes de
traitement.
A l'opposé des solutions existantes basées sur l'analyse
du MNT, la solution innovante pour ce projet s'est portée sur
un traitement direct du nuage de points, à partir des outils
de géométrie discrète développés
dans ADAGIo (segments flous, scans directionnels adaptatifs).
Un algorithme général pour la détection interactive
de structures linéaires dans les données brutes a
été mis au point
[49].
A partir d'une barre initiale tracée par l'utilisateur sur
le MNT fournissant un scan initial, le profil de points 3D
correspondant est analysé pour détecter la
présence de la structure.
La structure est ensuite recherchée dans les scans adjacents
de part et d'autre, jusqu'à l'occurrence d'un nombre limite
d'échecs.
Les outils de géométrie discrète utilisés
dans les traitements confèrent son efficacité à
cette approche.
Par ailleurs, il est possible de repérer et franchir les
secteurs pauvres en points, contrairement aux méthodes
exclusivement basées sur l'analyse du MNT.
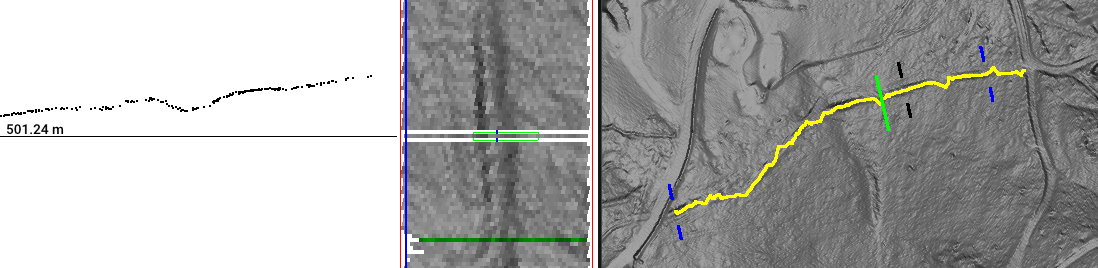
Extraction interactive d'un chemin creux :
à gauche, un profil de points; au centre, les scans
analysés ; à droite, la structure extraite
superposée au MNT (en vert, la barre initiale ; en noir,
l'emplacement du profil analysé ; en bleu, les bornes
sélectionnées pour la mesure du volume).
L'algorithme a été validé sur deux types de
structures.
Les pistes forestières, bien marquées dans les vues du
MNT, ont servi de vérité de terrain pour évaluer
les performances de l'approche : des portions de quelques centaines
de mètres de pistes sont extraites à la volée
(120 ms en moyenne), avec une précision de l'ordre de 75 % et
une couverture de l'ordre de 80 %.
Cet algorithme a aussi été adapté pour la
détection de structures linéaires en
élévation (crêtes, ruptures de pente, vestiges
de murs).
Une vérification sur des exemples bien visibles a pu être
menée pour valider la faisabilité de l'approche.
Suite à ces résultats, l'algorithme d'extraction a
été intégré dans une approche
entièrement automatique de détection des pistes
forestières
[50],
et testé à plus large échelle.
Pour trouver des graines, le filtre morphologique RORPO est
appliqué à un rendu basé gradient du DTM,
afin de rehausser les formes élongées.
Les contours droits sont ensuite extraits à l'aide de FBSD
pour placer les graines aux endroits pertinents.
Le traitement de l'ensemble du massif du Fossard (un secteur de 78
kilomètres carrés,
comportant autour de 755 millions de points) a été
traité en 29 minutes sur un ordinateur portable standard.
L'outil d'extraction automatique, nommé
AMREL
(Automatic Mountain Road Extraction from LiDAR data),
est accessible sur GitHub avec des
données de test.
Enfin, l'algorithme interactif a été complété
pour aussi traiter des structures linéaires en creux et
permettre l'analyse de leurs profils longitudinal et transversal,
ainsi que l'estimation de leur volume
[51].
Son utilité en contexte applicatif a été
vérifiée sur deux exemples concrets :
le relevé de vestiges de murs d'enceinte connus et la recherche
de leur prolongement en secteur non encore fouillés par les
archéologues; l'étude du profil longitudinal et de la
volumétrie de plusieurs types de chemins creux afin de
comprendre leur évolution.
L'outil de détection, nommé
ILSD (Interactive Linear Structures Detector),
est accessible sur GitHub.
Modélisation 3D interactive
Le troisième axe porte sur la conception d'outils
géométriques pour l'aide à la décision
dans des tâches de modélisation 3D interactive.
La modélisation 3D automatique vise la production d'un
modèle 3D dense mais peu discriminant de la scène
perçue.
A l'opposé, la modélisation 3D interactive offre
à l'utilisateur la possibilité de composer le
modèle 3D en différenciant le niveau de détail
porté à chacun des objets composant la scène.
Au-delà des aspects liés à l'ergonomie de la
réalisation de cette tâche complexe, des
incohérences issues du cumul d'erreurs de mesure peuvent
survenir et réduire d'autant l'intérêt de cette
approche.
L'objectif est donc de produire des outils d'aide à la
décision exploitant les résultats des deux premiers axes.
Par exemple, il serait utile de fournir à la demande de
l'utilisateur des indications sur la confiance accordée au
modèle, en propageant dans les calculs d'interprétation
3D (calculs de pose), l'information de qualité issue de
l'extraction des indices visuels (segments flous).