Young researcher grant - ANR-12-JS03-0009 - 2013-2016
 |
Our last paper is on the cover of Nature! See our press material page for videos, FAQ, etc.
The paper is available online on Nature's website. A pre-review, author generated draft is available here: [pdf] |
Summary
The diversity and overall efficiency of lifeforms demonstrates the power of evolution as an optimization and innovation process. Evolutionary Algorithms (EAs) takes inspiration from this success and they are now mature black-box optimization algorithms and creative, automatic open-ended design methods.
Natural evolution is however more than a creative optimization process, it is also an efficient mechanism to adapt lifeforms to new environments and constraints. Importantly, such an adaptation to new situations is one of the main open challenges in robotics because autonomous robots have to deal with many situations unforeseen by their creators. Nevertheless, researchers in Evolutionary Robotics (ER) almost exclusively focused their efforts on the optimization abilities of the evolutionary process. Only a few, disparate works investigated the adaptive power of evolution for robotics.
The overall purpose of this project is to fulfill this gap by employing both the creative and the adaptive abilities of evolutionary algorithms to design algorithms that can autonomously and creatively adapt the behavior of robots to unforeseen situations. In the typical scenario, a mobile robot faces a situation that requires adaptation (e.g. a leg is broken or the ground surface changed). The robot is allowed to launch a few experiments to investigate the situation; after a few minutes it should be able to cope with the new situation to pursue its mission until a new adaption is required. Algorithms that will be developed in this project will be tested on versatile wheel-legged robots based on commercially available ``bioloid'' kits.
Instead of trying to simulate the evolution of an ecosystem of robots (i.e. directly copy natural evolution), we will take inspiration from direct policy search algorithms that have been designed for reinforcement learning scenarios in robotics. To expand the range of possible behaviors and thus enable a creative adaptation, we will substitute the local optimization algorithm that power these algorithms with evolutionary ones because they can optimize both the structure and the parameters of controllers.
The main challenge to harness the creative and adaptive power of EAs in this fashion is to minimize the number of trials on the robot while allowing a very large (possibly infinite) number of behaviors. We will tackle this challenge with two complementary lines of research:
- taking inspiration from Bongard's work on self-model based resilient machines and from our previous work on the ``reality gap'', we will design a new adaptation scheme in which most of the optimization will rely on a simulated self-model while the search will be focused on controllers that work on the real robot in the current situation;
- we will improve evolvability (i.e. the ability to quickly adapt to new situations) as much as possible by using a bio-inspired encoding (HyperNEAT + non-linear oscillators) and by encouraging modularity (by adding new selective pressures).

Main publications
- Cully, A., Clune, J., Tarapore, D., and Mouret, J.-B. Robots that can adapt like animals., Nature 521.7553 2015 [pdf]
- Tarapore, D. and Mouret, J.-B. Evolvability signatures of generative encodings: beyond standard performance benchmarks. Information Sciences. 2015. Pages 1-24. to appear. [pdf]
- A. Cully and J.-B. Mouret. Evolving a Behavioral Repertoire for a Walking Robot, Evolutionary Computation. 2015. [pdf]
- S. Koos, A. Cully and J.-B. Mouret. Fast Damage Recovery in Robotics with the T-Resilience Algorithm, International Journal of Robotics Research. 2013. [pdf] [More info]
- Clune, Jeff* and Mouret, Jean-Baptiste* and Lipson, Hod (2013). The evolutionary origins of modularity.
Proceedings of the Royal Society B. Vol 280 Pages 20122863. [ PDF | DOI | BIB | Supplementary material ] [*Jeff Clune and Jean-Baptiste Mouret contributed equally to this work] - D. Tarapore and J.-B. Mouret. Comparing the evolvability of generative encoding schemes. 2014. Proceedings of ALife. [pdf]
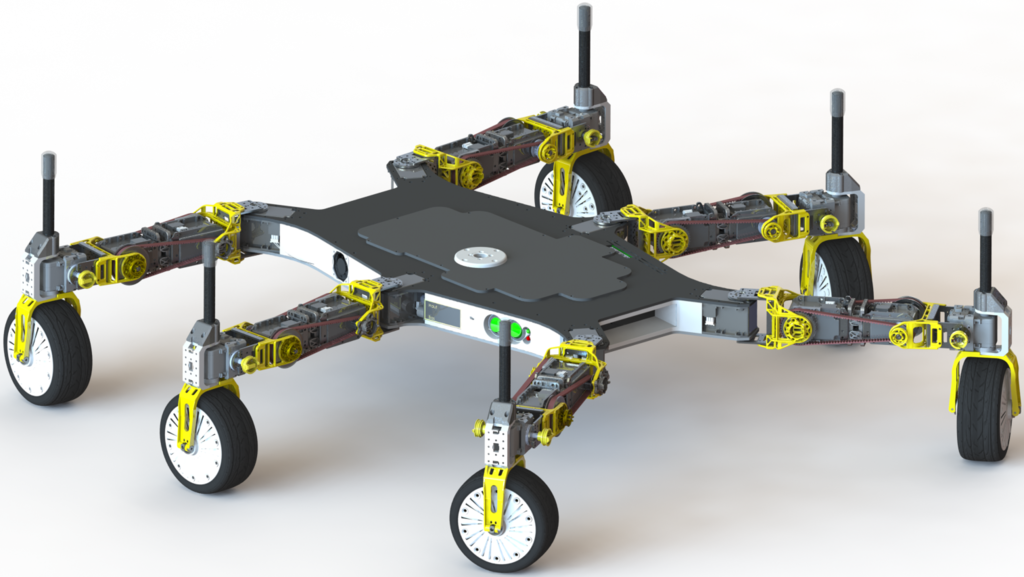
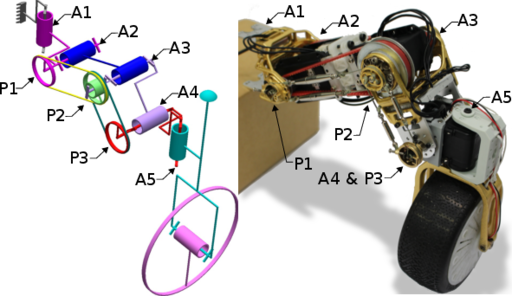
- J.-M. Jehanno, A. Cully, C. Grand and J.-B. Mouret. Design of a Wheel-Legged Hexapod Robot for Creative Adaptation. Proceedings of CLAWAR. 2014. [pdf]
- A. Cully and J.-B. Mouret. Behavior Repertoire Learning in Robotics, 2013. Proceedings of GECCO. [pdf]
- S. Doncieux and J.-B. Mouret. Behavioral Diversity with Multiple Behavioral Distances. Proc. of IEEE Congress on Evolutionary Computation, 2013 (CEC 2013). Pages 1-8. [pdf]
The Creadapt robot
Participants (from left to right)
|
|
