> Humanoid robots
We bridge the gap between machine learning and whole-body control to develop natural human avatars.
Humanoid robots are some of the most versatile machines ever created. Thanks to their anthropomorphism, they can perform bimanual manipulation like grasping large boxes, they can bend to pick up objects from the ground, or reach high places by the ceiling; they can also walk on rough terrain, crawl, climb stairs or push objects. Differently from other robotic platforms, they have a kinematic structure that allows them to enter narrow or cluttered spaces, and operate in environments that were primarily designed for humans. In short, humanoid robots have the potential of being as versatile as humans. This versatility is especially important when robots are sent to truly unexpected situations in which they have to perform a task for which they were not designed drc.
While robots in the manufacturing industry perform well-defined tasks in known environments, many situations in the outside world involve some creative adaptation of the tasks. For instance, working in remote places like in space or on an oil platform very often requires performing tasks in unexpected ways. Similarly, disasters --- natural or industrial --- are events that are, by definition, out of the ordinary routine, and during which robots could be critical to save lives. However, autonomous robots are far from being the creative problem solvers that humans are; this is why humanoid robots are most useful when they are teleoperated: the capabilities of the robot and of the operator are combined to solve complex problems remotely.

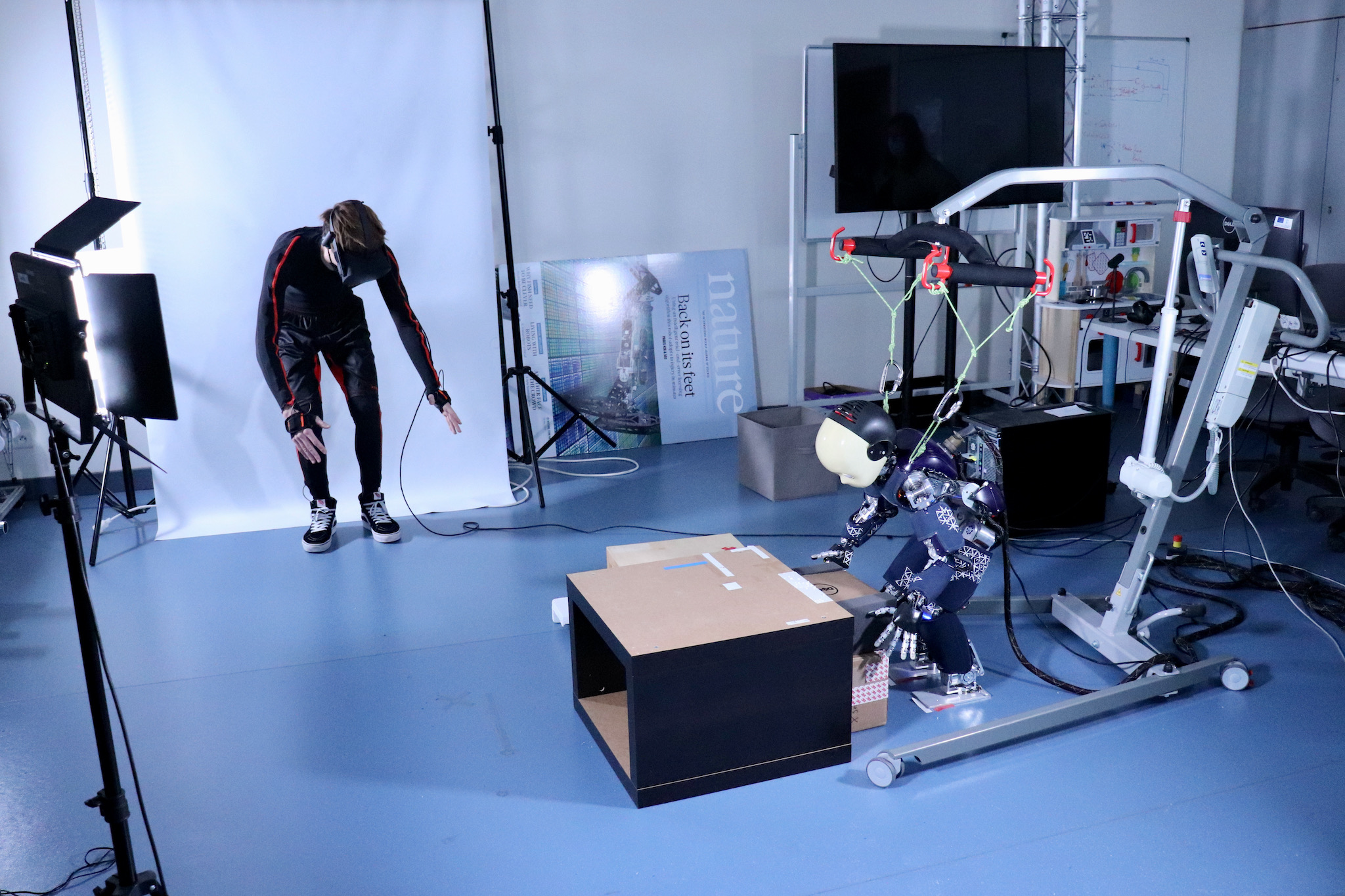
While humanoid robots can be operated from high-level commands and classic joysticks, they can exploit their human-like morphology to directly replicate the human posture and gestures, captured by a motion tracking system. This technique coupled with the intelligence of the human operator makes them realize tasks fluently as human avatars. With such a whole-body teleoperation, the entire body of the robot can be controlled precisely while the human operator, equipped with a virtual reality headset, can feel as if they have been "projected" to the remote situation.} Additionally, there is a good match between teleoperation and humanoid robots because they are typically considered for high-value missions (life-or-death situations, nuclear accidents, ...) for which the wage of an operator is negligible, but the stakes are too high to let a robot decide everything by itself. Compared to other robots, humanoids are challenging to control because they need to carefully synchronize its 30+ degrees of freedom to both achieve its tasks (e.g., moving the hands) and keep its balance. This whole-body control problem is currently solved using quadratic programming.
Main publications
Articles in peer-reviewed journals
2024
Q. Rouxel, S. Ivaldi, J.-B Mouret (2024). Multi-Contact Whole-Body Force Control for Position-Controlled Robots.
Robotics and Automation Letters.
→ [pdf] [url] [video]
Jacques Zhong and Vincent Weistroffer and Jean-Baptiste
Mouret and Francis Colas and Pauline Maurice (2023). Workstation Suitability Maps: Generating Ergonomic Behaviors on a
Population of Virtual Humans with Multi-task Optimization.
IEEE Robotics and Automation Letters.
→ [pdf] [url] [video]
T. Anne, E. Dalin, I. Bergonzani, S. Ivaldi, J.-B Mouret (2022). First do not fall: learning to exploit a wall with a damaged humanoid robot.
IEEE Robotics and Automation Letters. IEEE.
→ [pdf] [url] [video]
L. Penco, E. Mingo Hoffman, V. Modugno, W. Gomes, J.-B Mouret, S. Ivaldi (2020). Learning Robust Task Priorities and Gains for Control of Redundant Robots.
IEEE Robotics and Automation Letters. 5. (2) 2626--2633. IEEE .
→ [pdf] [url] [video]
Articles in peer-reviewed conferences
2025
D. Totsila, C. Donoso, E. Hoffman, J.-B Mouret, S. Ivaldi (2025). Safe Bimanual Teleoperation with Language-Guided Collision Avoidance.
Proc. of IEEE conference on Telepresence
→ [pdf] [url]
Q. Rouxel, C. Donoso, F. Chen, S. Ivaldi, J.-B Mouret (2025). Extremum Flow Matching for Offline Goal Conditioned Reinforcement Learning.
Proc. of IEEE Humanoids
→ [pdf] [url]
T. Anne, J.-B Mouret (2024). Parametric-Task MAP-Elites.
Proc. of GECCO ACM. 10.1145/3638529.3653993
→ [pdf] [url]
D. Totsila, Q. Rouxel, J.-B Mouret, S. Ivaldi (2024). Words2Contact: Identifying Support Contacts from Verbal Instructions Using Foundation Models.
IEEE RAS International Conference on Humanoids
→ [pdf] [url] [video]
Q. Rouxel, A. Ferrari, S. Ivaldi, J.-B Mouret (2024). Flow Matching Imitation Learning for Multi-Support Manipulation.
IEEE RAS International Conference on Humanoids [url] [video]
L. Penco, J.-B Mouret, S. Ivaldi (2023). Prescient teleoperation of humanoid robots.
Proc. of IEEE Humanoids [url] [video]
E. d'Elia, J.-B Mouret, J. Kober, S. Ivaldi (2022). Automatic Tuning and Selection of Whole-Body Controllers.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
→ [pdf] [url] [video]
W. Gomes, V. Radhakrishnan, L. Penco, V. Modugno, J.-B Mouret, S. Ivaldi (2019). Humanoid Whole-Body Movement Optimization from Retargeted Human Motions.
IEEE-RAS International Conference on Humanoid Robots
→ [pdf] [url] [video]
L. Penco, B. Clément, V. Modugno, E. Hoffman, G. Nava, D. Pucci, N. Tsagarakis, J.-B Mouret, S. Ivaldi (2018). Robust Real-time Whole-Body Motion Retargeting from Human to Humanoid.
IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids) 425--432.
→ [pdf] [url] [video]
J. Spitz, K. Bouyarmane, S. Ivaldi, J.-B Mouret (2017). Trial-and-Error Learning of Repulsors for Humanoid QP-based Whole-Body Control.
Proc. of IEEE Humanoids
→ [pdf] [url] [video]
M. Oliveira, S. Doncieux, J.-B Mouret, C. Peixoto Santos (2013). Optimization of Humanoid Walking Controller: Crossing the Reality Gap.
Proc. of IEEE Humanoids 1-7. 10.1109/HUMANOIDS.2013.7029963
→ [pdf]