> Minimally invasive archaeology
We design innovative robots for minimally invasive exploration in heritage buildings.
Press release: [pdf]
|
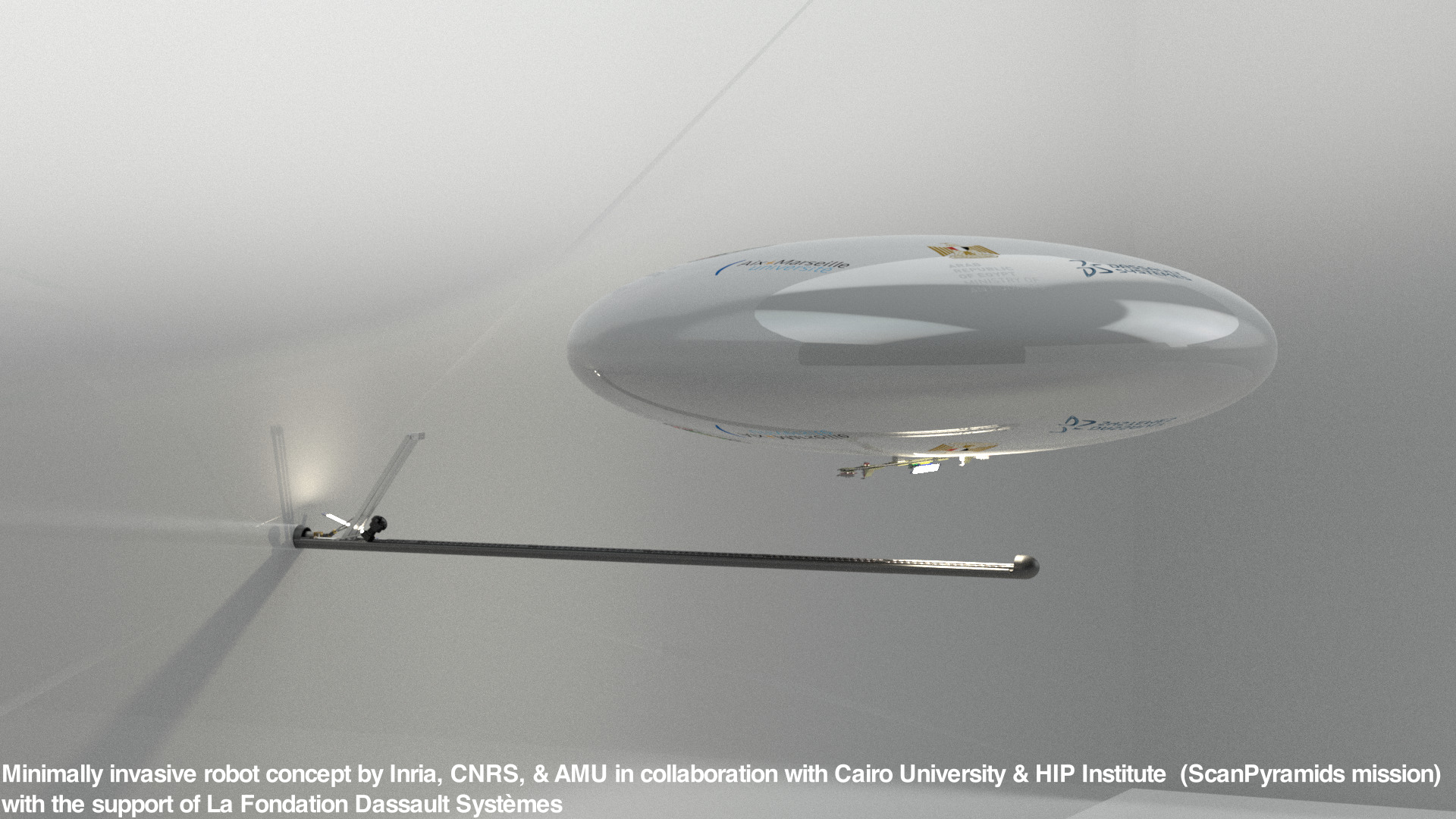
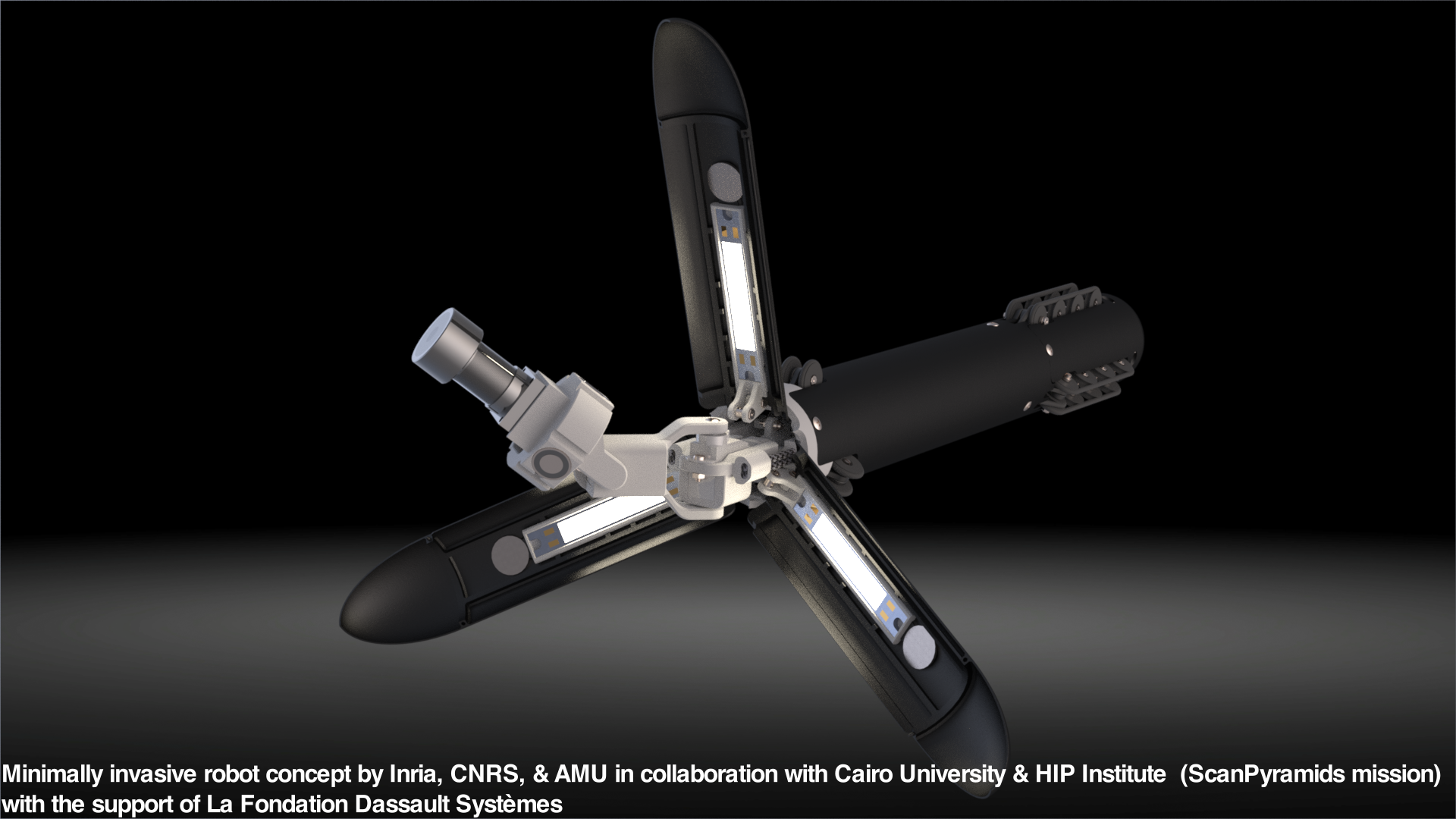
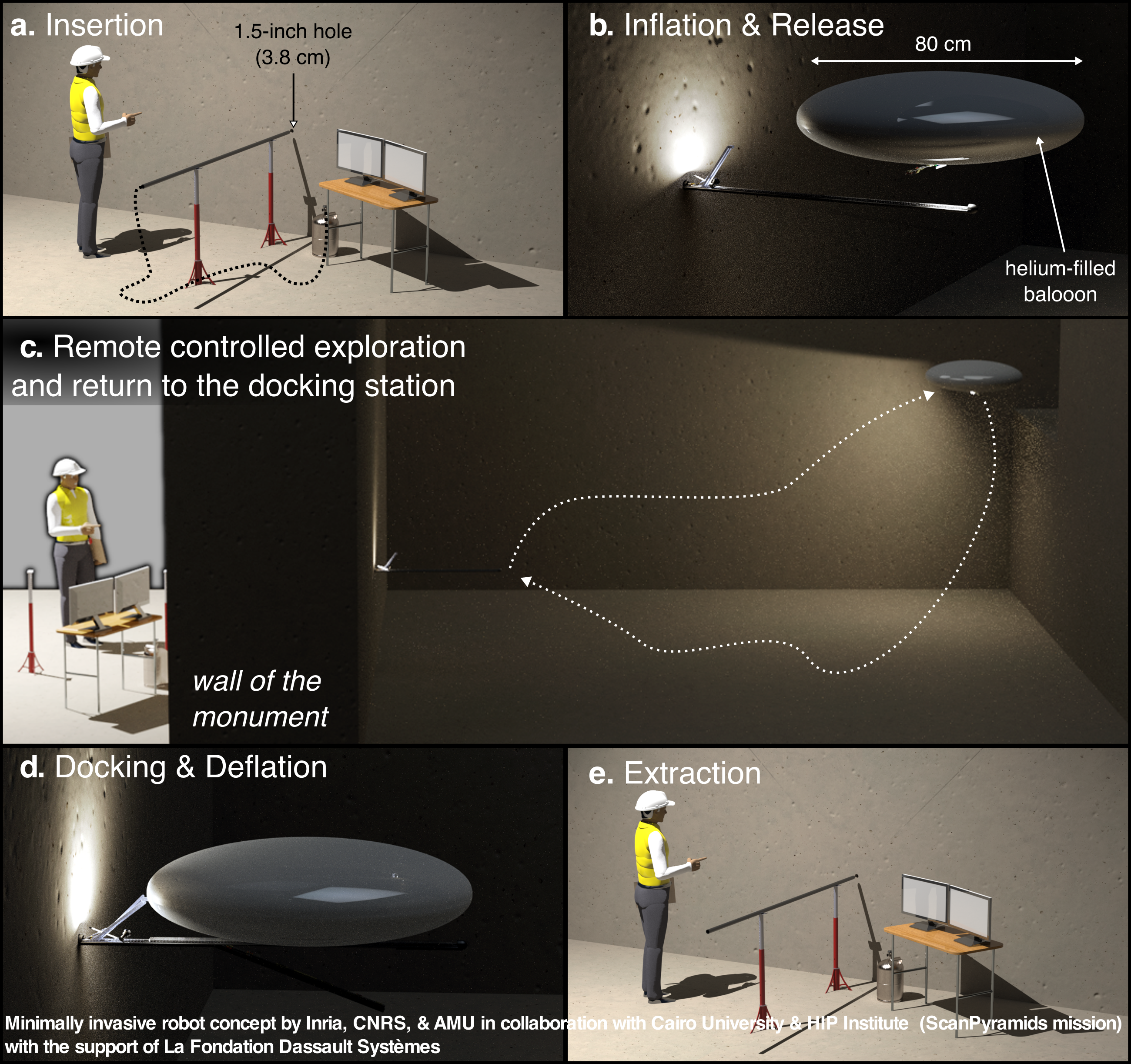
The overall idea is to use a hole with a diameter inferior to 1.5 inches (about 3.5 cm) and insert a tiny exploration robot so that scientists can remotely explore inaccessible places. At the current time, there is no plan to send this robot to any particular monument, but it is the right time to start working on the appropriate technologies and validate them as thoroughly as possible. Several archaeological teams have already shown interest in the project, for different missions in various countries. We envision exploration to take place in two stages. In the first stage, they will insert a tubular robot with a pan-tilt camera to take high-resolution images of the inaccessible place. In the second stage, the team will insert a remote-controlled exploration robot that can travel through corridors and help mapping the interior. For this exciting second stage, we are currently designing a flying blimp that is folded for the insertion and inflated remotely in the inaccessible place. Once the mission will be complete, the blimp will return to its docking station, be deflated and, lastly, extracted from the same hole. The main challenge is to fit the envelope, the gondola, and all the deployment mechanisms in a 1.5-inch hole. The blimp itself will have a diameter of about 80 cm and a payload of about 50 g. Flying brings many benefits with respect to wheeled or legged robots: (1) they have no problem with stairs, slopes, rocks on the ground, (2) they can offer many more point of views, (3) they move faster than tiny robots. The team is focusing on a blimp and not on more traditional multi-copter drones because blimps are much safer for monuments. In particular, blimps can hit obstacles without crashing and without risking damage to the monument; they are also inherently stable, which is important for taking the best picture in low-light conditions, and they are more energy-efficient than multi-copters. The blimp carries a set of lights, a camera, sensors for assisted navigation, and four motors to move in all the directions. This flying robot will rely on the experience of Inria in robotics and on the lightweight bio-inspired sensors designed at the Institut des Sciences du Mouvement. On-board sensors and artificial intelligence will also help the pilot to avoid obstacles and to precisely land on the docking station. |
|
Publications
Articles in peer-reviewed journals
2017
K. Morishima, M. Kuno, A. Nishio, N. Kitagawa, Y. Manabe, M. Moto, F. Takasaki, H. Fujii, K. Satoh, H. Kodama, K. Hayashi, S. Odaka, S. Procureur, D. Attié, S. Bouteille, D. Calvet, C. Filosa, P. Magnier, I. Mandjavidze, M. Riallot, B. Marini, P. Gable, Y. Date, M. Sugiura, Y. Elshayeb, T. Elnady, M. Ezzy, E. Guerriero, V. Steiger, N. Serikoff, J.-B Mouret, B. Charlès, H. Helal, M. Tayoubi (2017). Discovery of a big void in Khufu's Pyramid by observation of cosmic-ray muons.
Nature. 1-13. Nature Publishing Group. 10.1038/nature24647
→ [pdf] [url]
