Cette année j’organise FRAMES 2023, save the date!

Cette année j’organise FRAMES 2023, save the date!
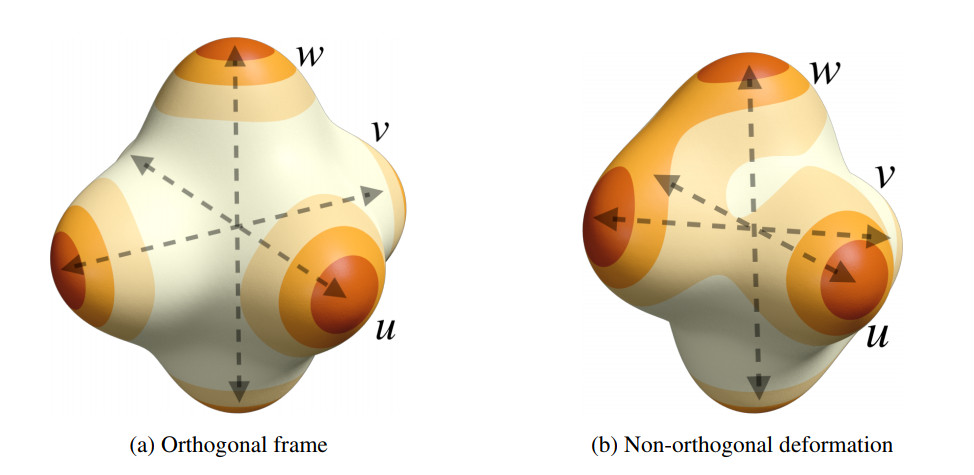
Notre article « Designing 2D and 3D Non-Orthogonal Frame Fields » a reçu le 2nd best paper award de SPM2021 !
This course explains least squares optimization, nowadays a simple and well-mastered technology. We show how this simple method can solve a large number of problems that would be difficult to approach in any other way. This course provides a simple, understandable yet powerful tool that most coders can use, in the contrast with other algorithms sharing this paradigm (numerical simulation and deep learning) which are more complex to master.
Meet Gyrubot, a nonanthropomorphic biped at ICRA’2021!
Je suis vraiment fier de notre article « Restricted Power Diagrams on the GPU »:
I have won the “best expertise” nomination for the TechnoText 2019, with my article on understandable raytracing. The award goes for the best russian language IT-related text of 2019. I have filmed a short video for the award ceremony: