

|
A Smart AppartmentInria Research Center in Nancy has supported since 2010 the design and the construction of an innovative platform for favoring research in assistance for elderly people at home. This platform has been mainly funded by the CPER MISN (region of Lorraine , project Info-Situ (2010-2013). It consists of a standard apartment type F2, with a certain number of “smart and connected devices” such as sensor networks. This platform has been designed to make easy technical experimentation in an environment which is as close as possible to reality. Many technical developments have been done. In particular, we have been working both (1) on the development of new algorithms to exploit the equipments, and (2) on the effective deployment of different kind of connected devices. These devices are all interconnected within the Robotic Operating System (ROS). |
|
|
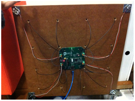
With a load sensing floorPressure sensing tiles which has been designed by Maia team (in cooperation which Hikob (http://www.hikob.com/applications/recherche) and Inria SED of Grenoble (Roger Pissard-Gibollet). Ninety tiles cover the floor of our experimental platform (HIS), which permit to sense activity through the natural interaction of people or robots with the floor when they are acting; |
|

|
A floor with a LED lighting systemThis load-sensing floor includes as well a LED lighting system which sits flush with the floor surface. This provides people with a new way to interact with their environment at home. The lighting system can easily be programmed in close loop with embedded floor sensors. Only your imagination is a limit to their usage. For example, it’s possible to create an automatic light path to guide a person while moving around home, which is useful, particularly at night. Serious game for physical stimulation of people is another way to exploit the lighting system. We already program a tetris game in which tiles are displayed on the floor surface while the player uses his/her body to control the tiles. |
|

|
With personal robotsMobile robots whose mobility allows a better coverage in term of perception of the environment. |
|

|
With network of depth cameras
|
|
|
With a motion capture systemRecently we got a Qualisys motion capture system 5funded by Satelor Project). |
Last updated: /date