Current and past Projects
2020-2022 : « KLIA : Kyutech-LORIA IA »
→Financement : CNRS INS2I
→Partenaires: Kyushu Technical University (Kyutech, Japon), departement « Human Intelligence Systems » , Graduate School of Life Science and Systems Engineering,
Soutien à la collaboration LORIA–KYUTECH dans le domaine de la robotique et des neurosciences computationelles. Ce projet permet l’échanges d’étudiants (Master, doctorants) pour des séjours scientifiques ainsi que des mobilités de chercheurs du Loria.
2020-2024 : KinAImotion : Mining Big Data to extract kinematic patterns and predict emotional human motor behaviors
→projet porté par le laboratoire ScaLab (UMR 9193 CNRS, Université de Lille)
→Financement : CNRS 80 Prime
→Partenaires: ScaLab UMR 9193
Financement d’un sujet de thèse : Rythmes, posture et compliance motrice pour faire émerger une synchronie émotionnelle entre une personne humaine et un robot humanoïde.
2020-2021 : Simulation neuro-musculo-squelettique de la marche humaine
→Financement : Association France Parkinson 
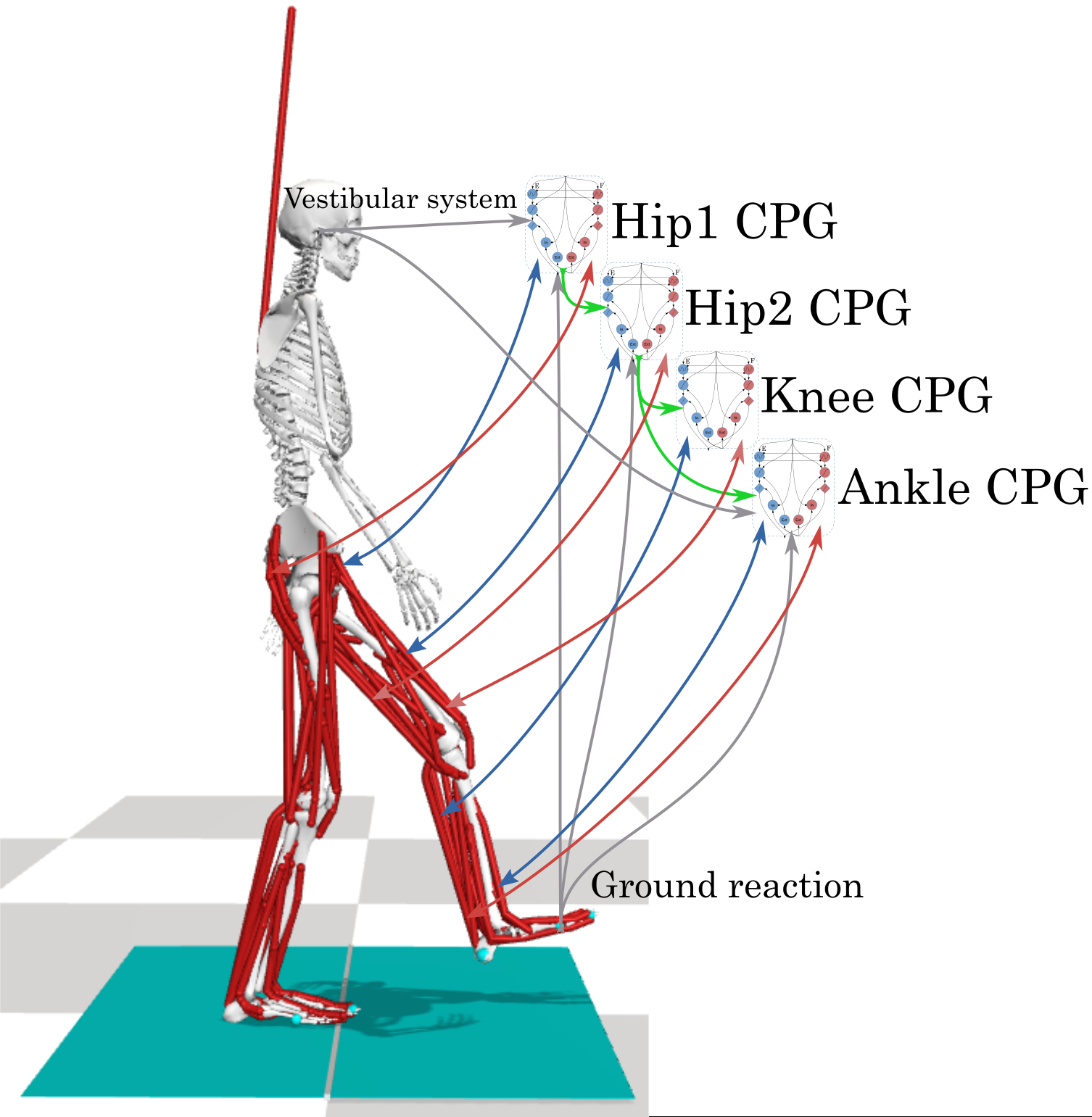
Ce projet concerne l’étude des mécanismes de contrôle de la locomotion déficiente dans la maladie de Parkinson. L’objectif est de développer une plate-forme de simulation permettant de reproduire
différents allures de marches saines et déficientes observées chez l’humain, incluant les troubles
moteurs caractéristiques à la maladie de Parkinson. L’originalité de cette plate-forme concerne la prise en compte des différents constituants qui interagissent au sein du système locomoteur humain: modélisation du squelette cliniquement plausible: intégration de nombreux muscles; simulation des signaux efférents; modélisation de réseaux neuronaux spinaux producteurs de mouvements (CPGs: Central pattern generators); intégration de signaux afférents.
2018 : HDCHS? (Human Dynamic Clamp in HandShaking?):
→Financement : CNRS S2IH-INS2I
→Partenaires: PERSEUS – CERCO
Ce projet concerne la robotique, les neurosciences et la psychologie expérimentale.
Il est dans la continuité des travaux commencés au LORIA sur la compréhension de l’acte de «poignée de mains» (handshaking) entre deux personnes, afin de les reproduire à plus long terme avec un robot humanoïde qui devra interagir naturellement avec l’humain. Cet acte est étudié car c’est une interaction physique et sociale multimodale, courante socialement, mais complexe du point de vue neurosciences et robotique car elle met en jeux des couplages physiques, psychologiques et sensorimoteurs qui sont changeants selon le contexte social. Ce projet propose de mener des expériences préliminaires sur le handshaking entre humains qui permettront de mieux comprendre les phénomènes de synchronisation physique et psychologique (couplage, verrouillage, rythmicité) plus connus sous le paradigme « Human Dynamic Clamp » (HDC), en vue d’en proposer des mécanismes de plasticité spécifiques pour les modèles de contrôleurs bio-inspirés étudiés au LORIA pour la commande des robots humanoïdes.
2018-2021 : INNOV’CHAIR 4.0
Développement et industrialisation d’une gamme de fauteuils roulants connectés
→Financement : Région Grand-Est
→Partenaires: Logo Silver (entreprise) , CentraleSupélec, ENIM, LCOMS, Institut de l’autonomie (ISEETECH)
Projet Région Grand-Est collaboratif de Recherche & Développement et d’Innovation.
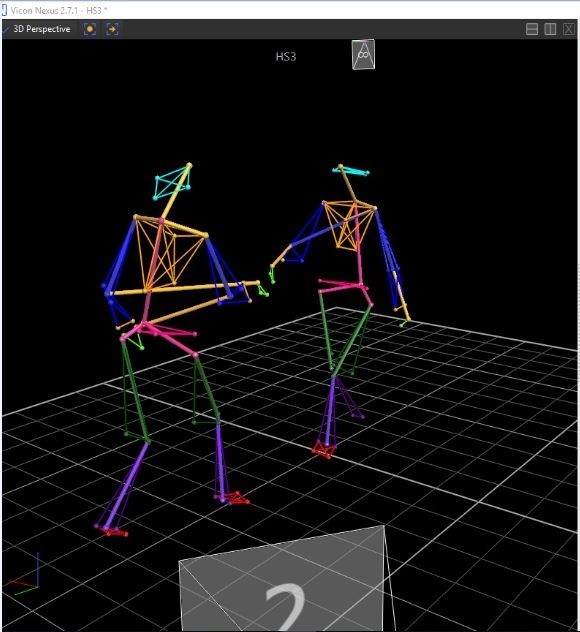
2015: ShakeHands :
Mesures des paramètres physiques de la poignée de main entre deux personnes selon le contexte social ou émotionnel
→Financement : PEPS CNRS Mirabelle
→Partenaires: InterPsy
Ce projet exploratoire réunit des roboticiens et des psychologues de l’interaction.
Il vise à comprendre et  à modéliser certains phénomènes physiques et cognitifs mis en jeux lors du geste de la poignée de main entre deux personnes selon le contexte social ou émotionnel. Des expériences sont menées pour mesurer les paramètres physiques fondamentaux de la poignée de main (fréquences des mouvements du bras, répartition des forces de serrage entre les mains selon ce contexte. L’objectif à plus long terme, et au-delà du projet, est d’établir des modèles de contrôleurs bio-inspirés qui permettront aux robots humanoïdes de produire ce type d’interaction.
à modéliser certains phénomènes physiques et cognitifs mis en jeux lors du geste de la poignée de main entre deux personnes selon le contexte social ou émotionnel. Des expériences sont menées pour mesurer les paramètres physiques fondamentaux de la poignée de main (fréquences des mouvements du bras, répartition des forces de serrage entre les mains selon ce contexte. L’objectif à plus long terme, et au-delà du projet, est d’établir des modèles de contrôleurs bio-inspirés qui permettront aux robots humanoïdes de produire ce type d’interaction.
2014-2015 : Guido : Un robot guide espiègle au Musée d’Art Moderne du Luxembourg
→Financement : Grand Nancy, Loria, Mines Nancy,
→Partenaires: MUDAM, KPMG
En collaboration avec l’artiste Paul Granjon (Université de Cardiff), Guido est un robot humanoïde monté sur roues pour faciliter son déplacement dans le musée. L’objectif est de concevoir un robot guide, ayant un aspect humanoïde et une attitude décalée et humoristique, pour interagir avec les visiteurs en les accueillant et accompagnants dans les diverses galeries du MUDAM, comme le ferait un accompagnateur humain. Guido au MUDAM