La question peut paraître saugrenue, surtout quand on pense qu’Ubuntu a été pendant des années un système plébiscité par beaucoup. Et pourtant, les dernières versions LTS (“Long Term Support” : support à long terme) ont sérieusement érodé la confiance que certains plaçaient dans ce système :
- les soucis d’Ubuntu 16.04 ;
- Ubuntu 18.04, pas vraiment (vraiment pas ?) un sauveur ;
- Ubuntu 20.04, toujours pas mieux ?
Les soucis d’Ubuntu 16.04
Dans la distribution 16.04 d’Ubuntu (mais aussi de ses variantes KUbuntu, LUbuntu, XUbuntu, EdUbuntu, …), de nombreux logiciels ont posé des problèmes :
- certains ont eu des comportements inadéquats dans certaines situations, comme la page d’accueil (LightDM) en présence d’écrans multiples (passage de l’écran intégré d’un portable à un écran externe ou à un vidéo-projecteur : affichage parfois irrécupérable, l’ordinateur devant être relancé) ;
- d’autres plantaient carrément, comme par exemple Gimp lorsqu’on utilisait l’outil de transformation par cage.
Cinq années plus tard, certains de ces problèmes (dont les deux cités plus haut) n’ont toujours pas été résolus, alors même qu’il existait des solutions (pour Gimp, lier le code à une version antérieure d’une bibliothèque, comme initialement prévu par les développeurs). Cette distribution a donc toujours été assez désagréable à utiliser, au point où certains sites ont préféré continuer (très longtemps) à utiliser la version LTS antérieure (Ubuntu 14.04).
Ubuntu 18.04, pas vraiment (vraiment pas ?) un sauveur
La sortie de la version LTS suivante, Ubuntu 18.04, a du coup été perçue comme une très bonne nouvelle. Pas pour très longtemps, malheureusement. En effet, en voulant à tout pris paraître plus à jour, la version 18.04 d’Ubuntu a choisi de proposer des versions plus récentes de certains environnements de développement comme Qt ou ROS, et uniquement ces versions.
Ainsi, alors qu’il est possible d’utiliser Qt4 ou Qt5 dans Ubuntu 16.04, Ubuntu 18.04 n’a longtemps proposé que Qt5. Or, le passage de Qt4 à Qt5 n’est pas anodin, la compatibilité ascendante n’ayant pas été assurée : certaines classes, servant à mettre en œuvre des comportements, ont disparu au profit d’autres mises en œuvre (par exemple, la classe QSignalMapper servant à lier un identifiant entier ou chaîne de caractères à un bouton et permettant de connecter plusieurs boutons à une seule méthode). Pour un enseignant-chercheur utilisant Qt4 pour ses cours et sa recherche, le passage de Ubuntu 16.04 à Ubuntu 18.04 était donc compliqué, si son code ne pouvait pas tourner sous Qt5 : trouver du temps pour mettre à jour son code est rarement facile.
Pour ROS, le problème était encore pire : seule la toute nouvelle version Melodic était disponible pour Ubuntu 18.04. Or, de nombreux paquets de ROS n’étaient disponibles que pour la version précédente Kinetic. Passer à Ubuntu 18.04 supposait donc d’assurer le portage de Kinetic à Melodic de tous les paquets de ROS requis par mes programmes. Autrement dit, une tâche encore plus irréalisable (car beaucoup plus coûteuse en temps) que celle concernant Qt. Heureusement, ces paquets ont été portés par d’autres personnes… Au bout d’un ou deux ans !
En conséquence, j’ai du attendre plusieurs années avant de pouvoir migrer d’Ubuntu 16.04 à 18.04, malgré les nombreux soucis du premier système…
Ubuntu 20.04, toujours pas mieux ?
Quant à Ubuntu 20.04, il semble continuer sur la même lancée : pas de version Melodic de ROS mais la suivante (encore très incomplète, évidemment), et des logiciels ne fonctionnant pas correctement (par exemple, hplip permet bien d’imprimer avec les imprimantes HP, mais pas de scanner avec certaines)… Et je n’ai que très peu essayé cette distribution, du fait du premier point !
En conclusion, j’envisage très sérieusement de renoncer à la distribution Ubuntu, bien qu’elle soit largement utilisée dans mon université et mon laboratoire de recherche, à moins que leur politique ne change radicalement. Je me tournerais sans doute vers Debian, qui propose une version stable très sûre (sans tous ces problèmes) et qui reste très proche d’utilisation d’Ubuntu. Qui vivra verra !..

 des robots,
des robots, 


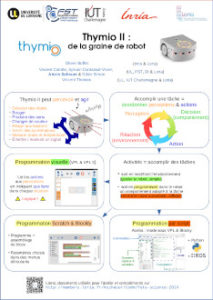

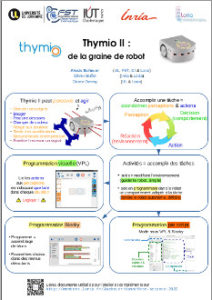

 un poster
un poster une présentation
une présentation

 Le poster
Le poster Le diaporama
Le diaporama






