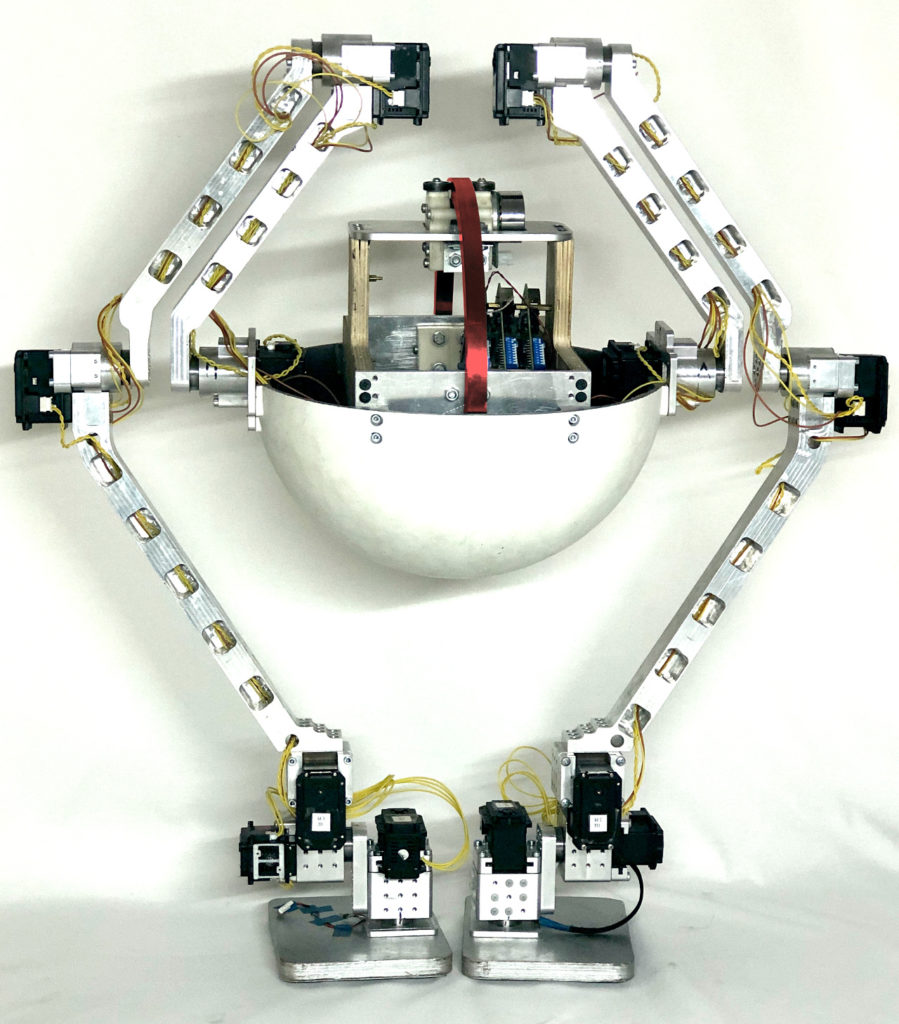
Our ongoing work on the AnyWalker robot is presented at the 11th IFAC Symposium on Nonlinear Control Systems. The slides are available here.




Our ongoing work on the AnyWalker robot is presented at the 11th IFAC Symposium on Nonlinear Control Systems. The slides are available here.