Our recent work «Experimental comparison of velocity estimators for a control moment gyroscope inverted pendulum».
NOLCOS 2019 – Differentiator-based velocity observer with sensor bias estimation: an inverted pendulum case study
Our ongoing work on the AnyWalker robot is presented at the 11th IFAC Symposium on Nonlinear Control Systems. The slides are available here.
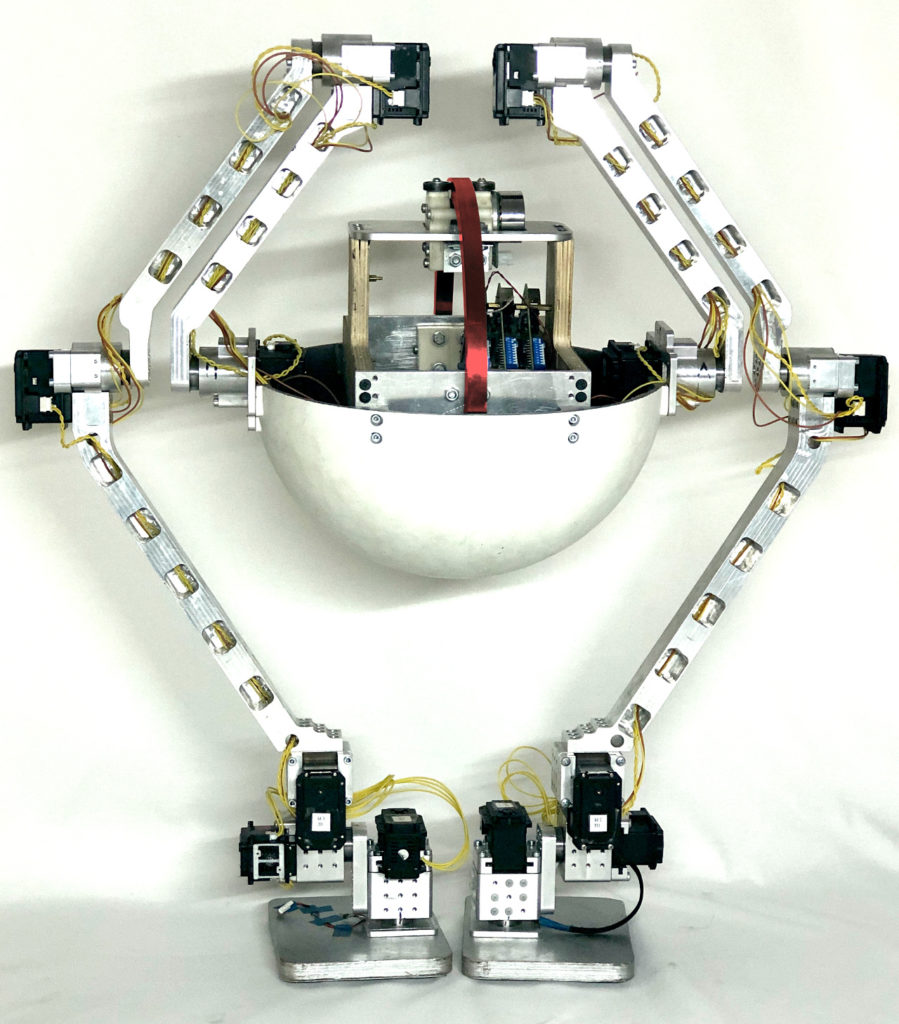
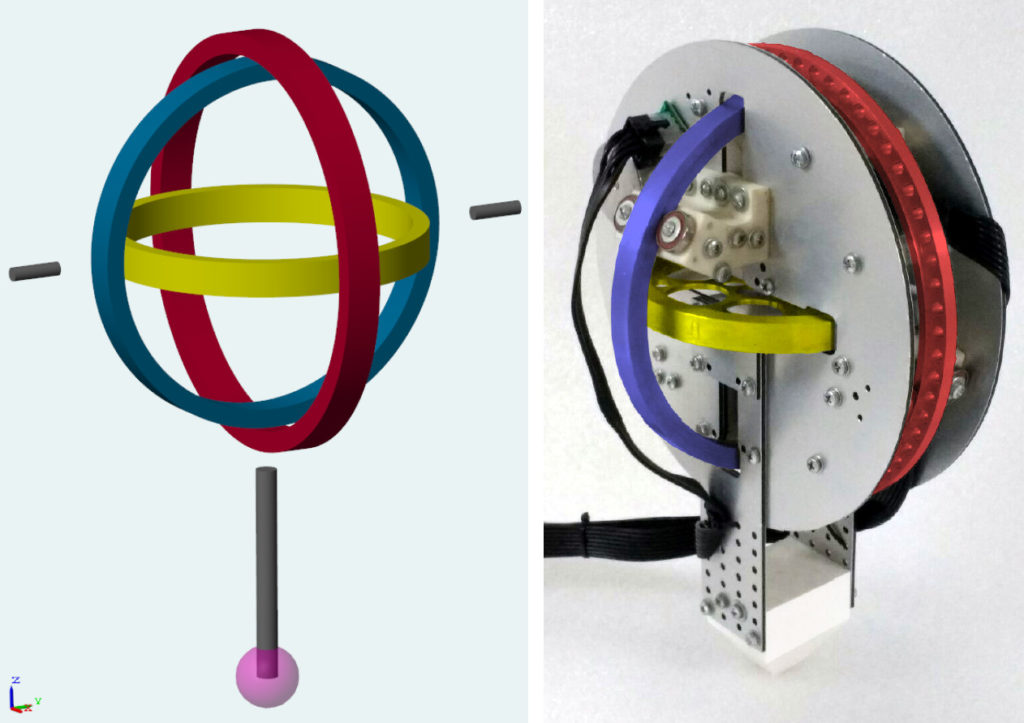
Scissored pair control moment gyroscope inverted pendulum
Work in progress, I have assembled a second gyro cube, so now I can play with a scissored pair CMG. The yaw angle is yet to control, but now it is a software (math) problem, should be doable quite easily.
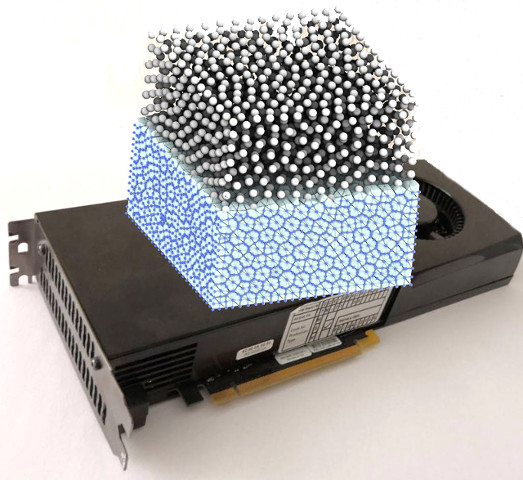
SIGGRAPH Asia 2018
Notre article « Meshless Voronoi on the GPU » vient d’être accepté à SIGGRAPH Asia 2018 !
Pendule inversé à base de volant d’inértie
Encore une petite machine pour étudier des problèmes de contrôle liés à la stabilisation de robots non-anthropomorphes.
Un nouveau jouet
Pour plus de détails rdv à ISR2018.
Inverted pendulum speed observation + swing up controller
Our paper on speed observation is published by the International Journal of Control.
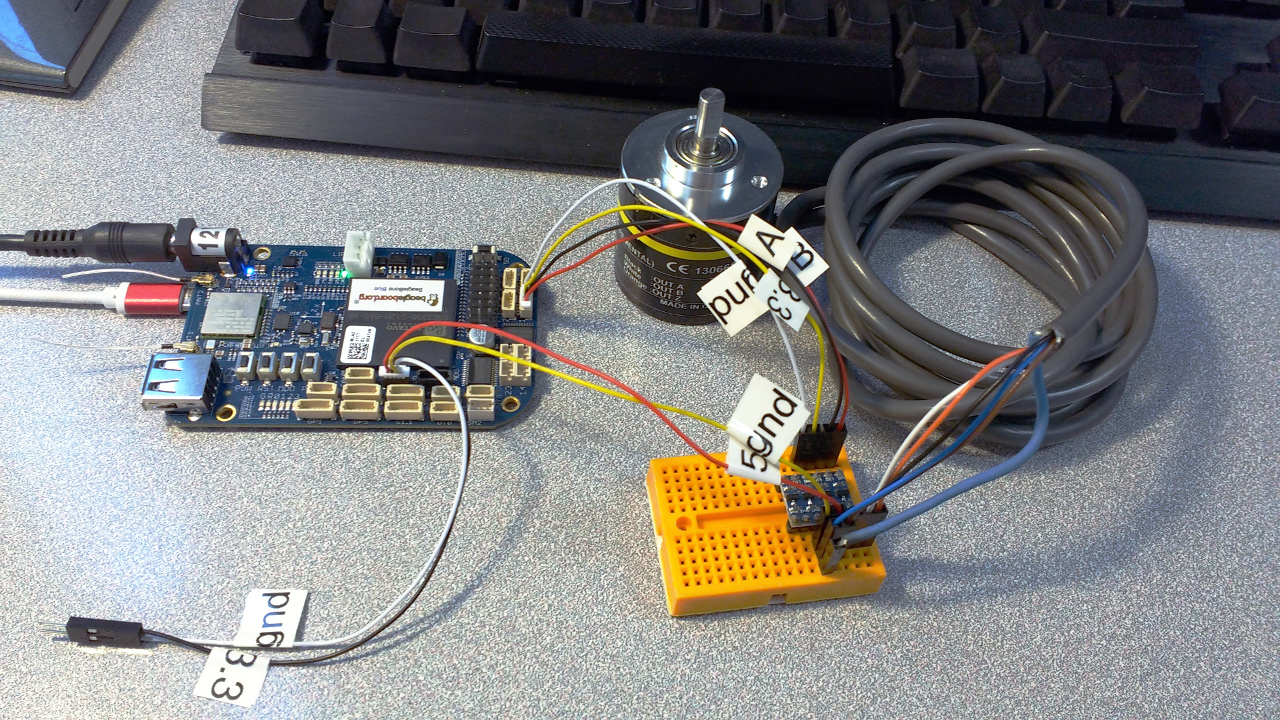
BeagleBone Blue
Farnell offered me a BeagleBone Blue robotics controller, can’t stop playing with the new toy!
Work in progress: speed observation
I am working on an experimental validation of speed observations for mechanical systems that are partially linearisable via coordinate changes.
Compteur ternaire
Un peu de nouvelles du monde ternaire, je vous rappele que je suis en train de preparer un cours sur l’architecture des ordinateurs. Voici un compteur qui supporte reectriture du registre et qui compte dans les deux sens :
Avec ce compteur j’ai construit toutes les briques qu’il fallait pour faire une unité arithmétique et logique. Faute de temps disponible, je pense qu’elle me prendera plusieurs mois.
Des videos de fonctionnement sont disponibles ici.



