Context
This work has been done in the context of interventional radiology, a techniques that uses imaging to guide needles or catheters through organs using minimal access into the body. Basic skills are still taught in an apprenticeship in patients. Our aim is to build a virtual simulator to learn how to carry out image-guided needle puncture. Imaging data sets for simulation of image-guided procedures would alter dynamically in response to deformation forces such as respiration and needle insertion.
Collaborations
This work is a part of the CRaIVE project, a consortium comprising of clinicians, physicists, computer scientists, clinical engineers and psychologists. The members are based at hospitals and universities across the UK, and overseas.
Results
An integrated simulator for image guided needle puncture has been produced. Data sets were derived from 6 patients and converted into deformable VEs. Preliminary content validation studies of a framework developed for training on liver biopsy procedures, demonstrated favourable observations that are leading to further revisions, including implementation of an immersive VE [1, 2].
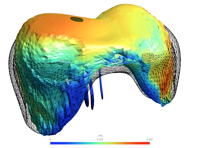
Particularly, segmentation and meshing techniques have been we developed to customize the anatomy on a patient [3] and a whole model of respiratory motion that supports interaction with a haptic device has been done as described on the Figure below. The physiological boundary conditions have been carefully studied to improve the realism of liver biopsy by adding the respiration process[4].
 |
 |
 |



