Context
An inguinal hernia is an unnatural protrusion of abdominal contents through a weakness in the abdominal wall of the inguinal area.
Improvements in patient safety in recent years has lead to increased supervision of training surgeons, which in turn prevents the junior surgeons from performing surgical tasks independently. While these improvements are a clear benefit for the safety of the patients, it increases the burden on senior surgeons and obstructs junior surgeons from gaining the confidence from performing procedures independently. From our literature review and discussions with surgeons, it has become apparent that one of the hardest and most crucial challenges in repairing inguinal hernias is understanding the three dimensional spatial relations of the complex anatomy in the inguinal region. It is our belief that these spatial relations are best taught using three-dimensional models in order to minimize the level of abstraction required by the trainee.
Our goal is to develop a system that can contribute to the confidence, skills and knowledge of the training surgeons, with a special focus on teaching the anatomy and its spatial relations, as well as the tasks involved in the repair procedure. By doing so, we aim to optimize training by senior surgeons and further improve patient safety by helping trainee surgeons progress through the learning curve faster.
Collaborations
This work has been done in collaboration with Fernando Bello and Niels Hald from Imperial College London (UK).
Results
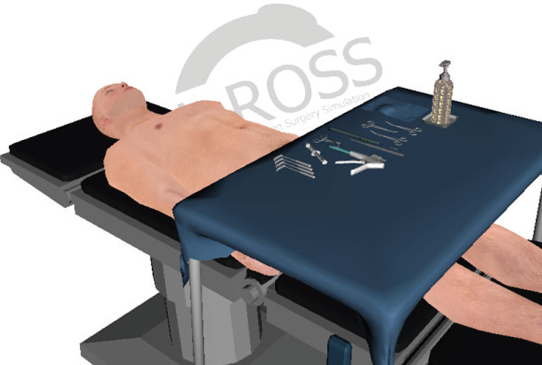
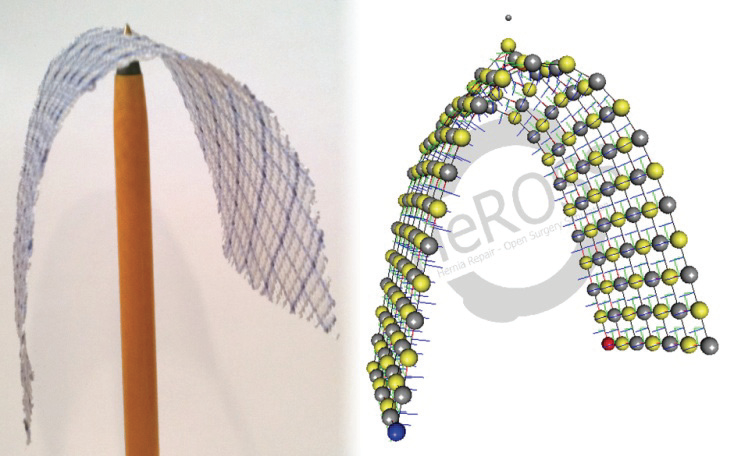
One of our key goals was to make the virtual environment simple and recognizable to the trainees to ensure that they will be able to intuitively understand and interact with it. To achieve this, we have made our virtual operating theatre a close, but simpler, recreation of a real operating theatre. This involved building 3D models of the necessary tools and equipment in the operating theatre. Based on our experiments, a Cosserat rod model of only twenty elements suffices to define the centreline of the spermatic cord and provide a fast and realistic biomechanical deformation. Our initial validation of this model by surgeons has indicated that it performs in a convincing manner [1].
 |
 |



