My research focuses on experimental and computational human motion analysis in the context of physical Human-robot interaction. This research serves to develop human-centered designs and controllers for collaborative robots, with a focus on ergonomics. I am therefore working at the intersection of robotics, biomechanics, ergonomics, neuroscience, and, more recently, machine learning. I am specifically interested in facilitating the deployment of collaborative robots on industrial sites.
Ergonomics in Collaborative Robotics
Virtual Ergonomics for the Design of Collaborative Robots (2011-2015)
Collaborative robotics, in which a robot physically collaborates with a human to carry out a task, is a promising solution to address the problem of work-related musculoskeletal disorders (MSDs). However the efficiency of a collaborative robot regarding the reduction of MSDs risks is highly task-dependent. Yet, even when designing dedicated systems, the ergonomic benefit provided by the robot is hardly ever quantitatively evaluated, because of the lack of relevant assessment tools.
During my PhD I developed a methodology for performing accurate ergonomic assessments of co-manipulation activities in simulation. Biomechanical demands are estimated with a digital human model animated with a LQP controller, hence removing the need for a real human or a physical mock-up of the robot. Among all the quantities measured, ergonomic indicators that are informative to evaluate a given activity are automatically identified with a sensitivity analysis. Combining this assessment method with an evolutionary algorithm, I implemented a tool to optimize the design of a collaborative robot for any given task. This tool was successfully validated on an assisted drilling example.
Ergonomic Control (ongoing)
Upper-Limb Exoskeleton for Overhead Work (2018-)
Overhead work is a frequent cause of shoulder work-related musculoskeletal disorders. Exoskeletons providing arm support have the potential to reduce shoulder strain, without requiring large scale reorganization of the workspace. Assessment of such systems is however not yet standardized and often incomplete. In this work we proposed a thorough assessment method for evaluating industrial exoskeletons, in an effort to initiate a first step towards standardization of the assessment process. We defined a list of evaluation criteria and associated performance metrics, which cover both objective and subjective effects of an exoskeleton, on the user and on the task being performed.
We then applied the proposed assessment to PAEXO, a novel passive exoskeleton for arm support during overhead work. Performance were measured during a lab study, where participants performed an overhead pointing task with and without wearing PAEXO, while their physical, physiological and psychological states were monitored. Comparison of conditions with and without the exoskeleton showed that working with PAEXO reduces shoulder physical strain, without causing side effects nor degrading task productivity. Positive effects of PAEXO were also visible at global level with a significant reduction in metabolic demand. Importantly, participants opinions of PAEXO were positive, in agreement with the objective measures. Our results show that PAEXO is a promising solution to help prevent shoulder injuries and diseases among overhead workers.

Automatic Recognition of Non-Ergonomic Movements using Inertial Sensors (2018-)
In industry, ergonomic assessment is currently performed manually based on the identification of postures and actions by experts. We aim at proposing a system for automatic ergonomic assessment based on activity recognition. We define a taxonomy of activities compatible with items evaluated in standard ergonomic worksheets. The proposed taxonomy is applied to learn activity recognition models based on Hidden Markov Models. We also use feature selection methods to identify dedicated sets of features to be used as input of the recognition models in order to maximize the recognition performance for our taxonomy. We successfully validate our recognition module on 13 participants performing an industry-like task.
http://www.youtube.com/watch?v=CSTsM2xJjxg&feature=emb_logo
Human Movement Understanding
Motor Strategies for the Manipulation of Underactuated Objects (2015-2017)
Manipulation of complex objects as in tool use is ubiquitous in daily life and has given humans an evolutionary advantage. Yet control principles for such actions remain elusive. Specifically, manipulating objects with internal degrees of freedom, such as bringing a cup of coffee to one’s mouth, presents a challenge since parts of the object are only indirectly controlled. To gain insight into the control mechanisms underlying such a skill, we examined the strategies that humans choose when manipulating an underactuated object.
We conducted a behavioral experiment in which participants manipulated a virtual cart-and-pendulum model with a haptic interface. Simulations of the cart-and-pendulum system coupled to a model of hand impedance allowed evaluation of strategies that were not observed among participants. Comparison of the behavioral and simulation results revealed that participants developed strategies that make the hand-object interaction more predictable. Using frequency analysis of the coupled system, we further showed that increased predictability is obtained by exploiting the object’s resonance structure.

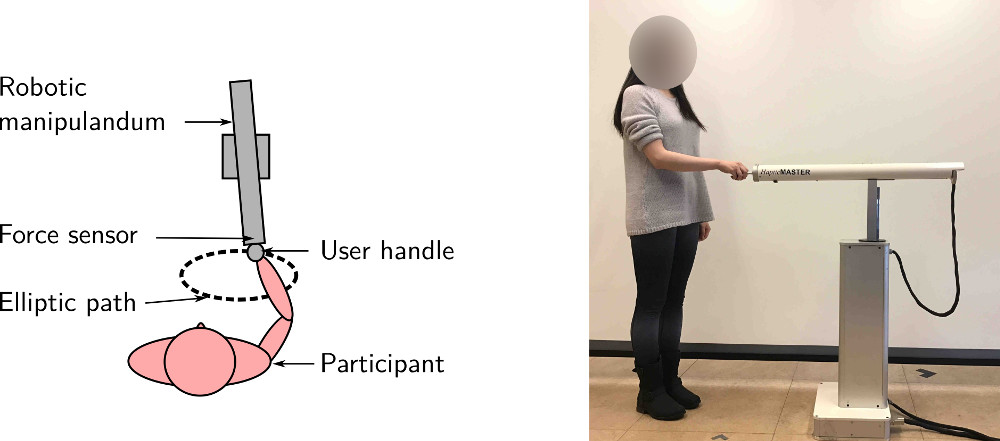
Biological Patterns of Movements in Physical Human-Robot Interaction (2015-2017)
In physical human-robot collaboration, cooperative execution of a task requires intuitive and efficient interaction between both actors. For humans, this means being able to predict and adapt to robot movements. Given that natural human movement exhibits several robust features, we examined whether human-robot physical interaction is facilitated when these features are considered in robot control. Specifically, we investigated how humans adapt to biological and non-biological velocity patterns in robot movements.
We conducted an experiment in which the end-effector of the HapticMaster robot traced a path with either biological (2/3 power law) or non-biological velocity profiles. Participants held the end-effector of the robot and were instructed to minimize the force applied on it. Results showed that the applied force was significantly lower when the robot moved with a biological velocity pattern. With extensive practice and enhanced feedback, participants were able to decrease their force when following a non-biological velocity pattern, but never reached forces below those obtained with the biological profile. Our results suggest that some robust features observed in natural human movements are also a strong preference in guided movements.