1) Overhead work with and without the exoskeleton PAEXO
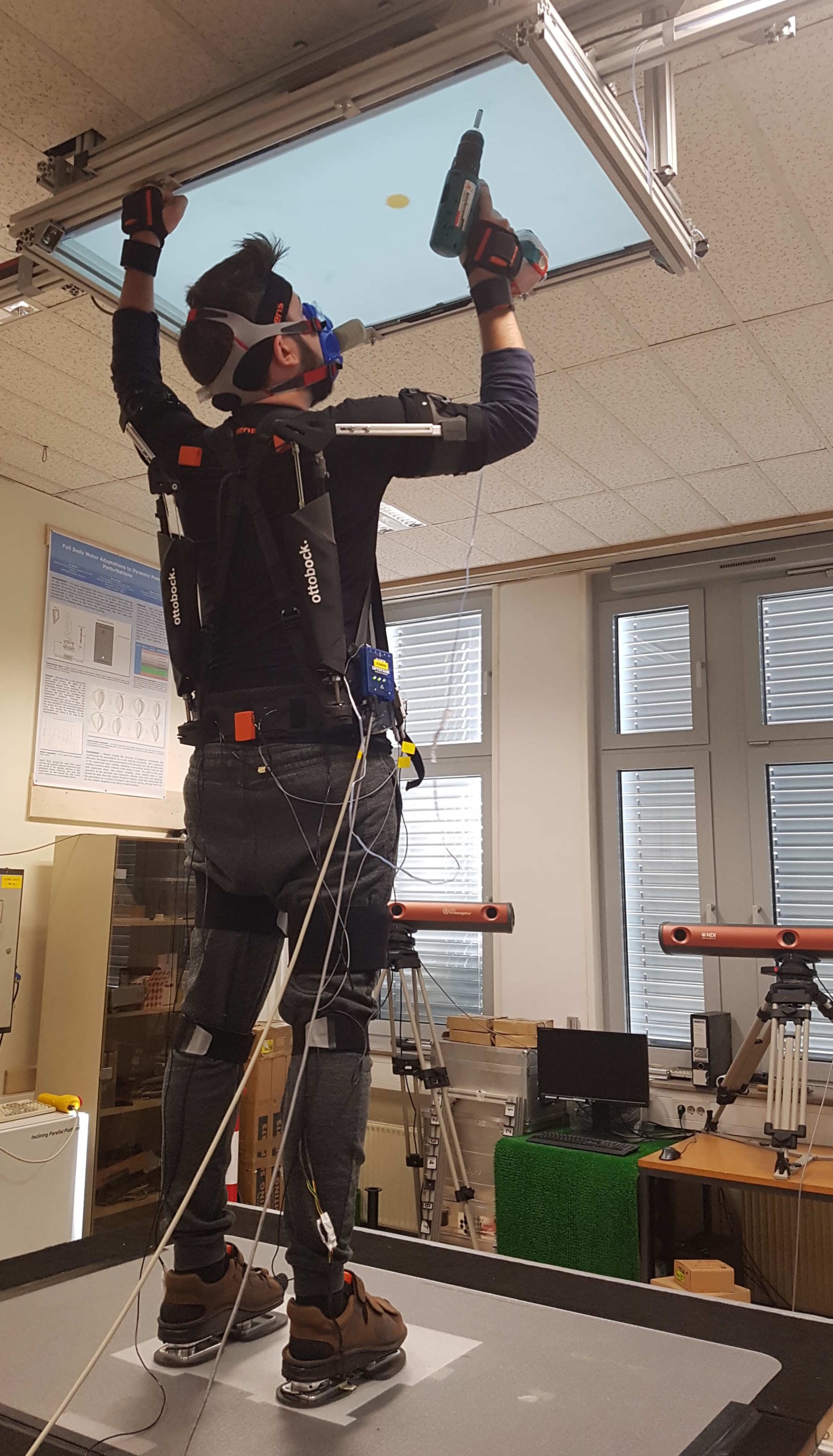 |
P. Maurice, J. Čamernik, D. Gorjan, B. Schirrmeister, J. Bornmann, L. Tagliapietra, C. Latella, D. Pucci, S. Ivaldi, J. Babič. (2018) “AndyData-lab-onePersonWithExoskeleton”. DOI : 10.5281/zenodo.1472214. Url: https://zenodo.org/record/1472214 Related publication: [TNSR 2020] This is one of the few open datasets with human movements performed with and without an exoskeleton, and the only available open-source dataset with Ottobock’s PAEXO exoskeleton. |
2) Sequences of typical manufacturing activities
 |
P. Maurice, A. Malaisé, C. Amiot, N. Paris, G.J. Richard, O. Rochel, L. Fritzsche, S. Ivaldi (2018) “AndyData-lab-onePerson”. DOI : 10.5281/zenodo.1471975. Url: https://zenodo.org/record/3254403 Related publication: [IJRR 2019],[RA-L 2019]. This dataset contains a variety of movements relevant for the manufacturing domain, captured with wearable sensors and external motion tracking system. They are performed with 13 different subjects, for a total of 5+ hours. It is our main dataset for learning action classifiers and predictive models.=> check the website of this dataset for more information! |
3) Whole-body movements exerting forces: posture & feet forces
 |
A. Malaisé, P. Maurice, O. Rochel, F. Colas, S. Ivaldi (2018) “AndyData-lab-onePersonWithShoes”. DOI : 10.5281/zenodo.1472122. Url: https://zenodo.org/record/1472122 This dataset is the first open-source dataset of whole-body movements performed with the wearable motion capture Xsens suit and the IIT/Xsens wearable shoes with onboard force/torque sensors. |
4) Human-human co-manipulation in collaborative and cooperative scenarios
 |
W.Gomes, P. Maurice, S. Ivaldi (2020) “Andy Data Human Human Object Co-manipulation”. DOI : 10.5281/zenodo.3989616. Url: https://doi.org/10.5281/zenodo.3989616 This open-source dataset contains experimental data for two object manipulation experiments: a human dyad executing a shared co-manipulation task (20 subjects), and a human executing the same task (10 subjects). Collaborative (no fixed roles) and cooperative (fixed roles – leader/ follower) interaction data are recorded. The collected data is comprised of kinematic data of the subjects’ arm; raw EMG signals from the subjects’ arm; and maximum value of co-contraction for each measured muscle. Additionally, there is data regarding the task performance for each dyad. These recordings were captured with a Qualisys system for motion capture, as well as Delsys EMG sensors for muscle activity signals. Related publication: [poster] |
5) Whole-body teleoperation of a humanoid by a human operator
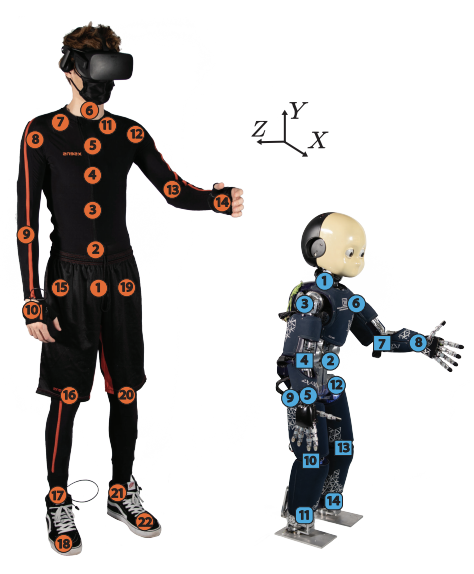 |
L. Penco, J.-B. Mouret, S. Ivaldi (2021) “AndyData-lab-onePersonTeleoperatingICub”. DOI : https://doi.org/10.5281/zenodo.4906336 Url: https://zenodo.org/record/4906336#.YQKvF5MzYoE This dataset contains physical measurements of a human operator teleoperating the humanoid robot iCub. The operator controlled the robot while performing different tasks: reaching a low/mid-height target with the right hand, reaching a high target with the right hand, picking up a box located at different locations and placing the box at different locations. The operator’s whole-body kinematics was recorded with an Xsens MVN suit. Related publication: [arxiv] |