
Whole-Body Compliant Dynamical Contacts for Cognitive Humanoids
(EU FP7 STREP, call ICT; 01/03/2013 – 28/02/2017)
The aim of CoDyCo is to advance the current control and cognitive understanding about robust, goal- directed whole-body motion interaction with multiple contacts. CoDyCo will go beyond traditional approaches: (1) proposing methodologies for performing coordinated interaction tasks with complex systems; (2) combining planning and compliance to deal with predictable and unpredictable events and contacts; (3) validating theoretical advances in real-world interaction scenarios with the iCub humanoid robot engaged in whole-body goal-directed tasks. The evaluations will show the iCub exploiting rigid supportive contacts, learning to compensate for compliant contacts, and utilizing assistive physical interaction.
Our team
Serena Ivaldi, Valerio Modugno (PhD, La Sapienza Univ. Rome), Oriane Dermy (PhD), Anthony Voilqué (master M2, 2016), Ugo Chervet (master M2, 2016)
Partners
- Italian Institute of Technology (Francesco Nori – coordinator)
- University of Birmingham (Mike Mistry)
- Université Pierre et Marie Curie (Vincent Padois)
- Josef Stefan Institute (Jan Babic)
- TU Darmstadt (Jan Peters)
Highlights

Physical human-robot interaction for lifting iCub from a chair – from Romano et al. (2017)
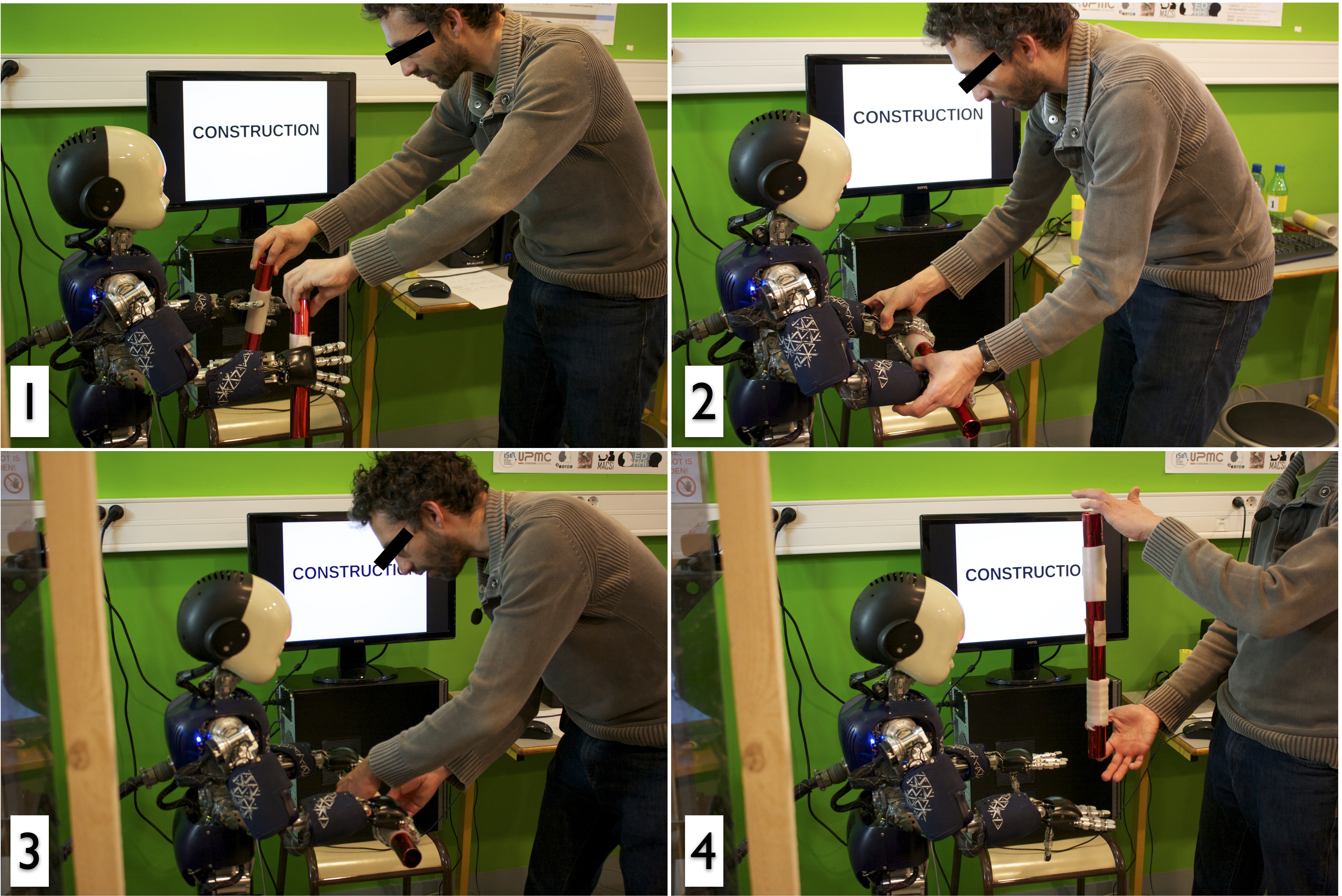
Cooperative assembly task between humans and the humanoid robot iCub – from Ivaldi et al. (2016)
Trajectory optimization for whole-body motions, such as stand-up from a chair, ensuring that constraints are never violated – from Modugno et al. (2017)

Learning task priorities for optimizing whole-body motions while ensuring that constraints are never violated – from Modugno et al. (2016)
Main publications
- Romano, F.; Nava, G.; Azad, M.; Camernik, J.; Dafarra, S.; Dermy, O.; Latella, C.; Lazzaroni, M.; Lober, R.; Lorenzini, M.; Pucci, D.; Sigaud, O.; Traversaro, S.; Babic, J.; Ivaldi, S.; Mistry, M.; Padois, V.; Nori, F.; (2017) The CoDyCo Project achievements and beyond: Towards Human Aware Whole-body Controllers for Physical Human Robot Interaction. IEEE Robotics and Automation Letters.
- Dermy, O.; Paraschos, A.; Ewerton, M.; Peters, J.; Charpillet, F.; Ivaldi, S. (2017) Prediction of intention during interaction with iCub with Probabilistic Movement Primitives. Frontiers in Robotics & AI, 4:45, doi: 10.3389/frobt.2017.00045.
- Padois, V.; Ivaldi, S.; Babic, J,; Mistry, M.; Peters, J.; Nori, F. (2016) Whole-body multi-contact motion in Humans and Humanoids: Advances of the CoDyCo European project. Robotics and Autonomous Systems.
- Ivaldi, S.; Lefort, S.; Peters, J.; Chetouani, M.; Provasi, J.; Zibetti, E. (2016) Towards engagement models that consider individual factors in HRI: on the relation of extroversion and negative attitude towards robots to gaze and speech during a human-robot assembly task. Int. Journal of Social Robotics.
- Ivaldi, S.; Babic, J.; Mistry, M.; Murphy, R. (2016) Special Issue on Whole-body control of contacts and dynamics for humanoid robots. Autonomous Robots, vol. 40, n.3, pp. 425-428.
- Modugno, V.; Chervet, U.; Oriolo, G.; Ivaldi, S. (2016) Learning soft task priorities for safe control of humanoid robots with constrained stochastic optimization. Proc. IEEE/RAS International Conf. on Humanoid Robots (HUMANOIDS).
- Modugno, V.; Neumann, G.; Rueckert, E.; Oriolo, G.; Peters, J.; Ivaldi, S. (2016) Learning soft task priorities for control of redundant robots. Proc. IEEE International Conf. on Robotics and Automation (ICRA).
- Calandra, C.; Ivaldi, S.; Deisenroth, M.P.; Peters, J. (2015) Learning Torque Control in Presence of Contacts using Tactile Sensing from Robot Skin. Proc. IEEE/RAS International Conf. on Humanoid Robots (HUMANOIDS).
- Calandra, R.; Ivaldi, S.; Deisenroth, M.P.; Rueckert, E.; Peters, J. (2015). Learning Inverse Dynamics Models with Contacts, Proc. IEEE International Conference on Robotics and Automation (ICRA).